
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ走行支援システムの開発
一未来は直ぐそこに一
一未来は直ぐそこに一
国土交通省 国土技術政策総合研究所
I T S研究室 研究官
I T S研究室 研究官
横 地 和 彦
㈶道路新産業開発機構 上席調査役
浦 野 隆
1 はじめに
日本では年間に1万人前後の交通事故死者が発生している。また,交通事故による社会的損失額は3兆8,000億円に達する。稠密な我が国において,欧米トップクラス並の自動車交通の安全性を実現するためには,道路交通安全に対して一層の積極的な対応が必要と考えられる。
国土交通省国土技術政策総合研究所(旧建設省土木研究所)で研究開発を行っている走行支援システムは,道路と車の協調によりリアルタイムにドライバーを支援することにより,事故を回避することを目的としたITSアプリケーションの一つである。
交通事故を引き起こす可能性がある危険な事象の発生に際して,ドライバーがとる基本的な3つの行動,すなわち危険な事象の認知,回避に関する判断,および操作に対し,走行支援システムは走行時の安全性を飛躍的に向上させるため,情報提供機能,警報機能,操作支援機能という3つの機能でドライバーにサービスを提供する。
走行支援システムの研究開発は平成8年度から本格的に開始し,道路交通の安全性向上を目的として,コンセプトの明確化,リクワイアメント(システムに要求される機能・性能)の策定,要素技術開発,システム開発等を推進してきた。本稿では,走行支援システムの開発状況を実証実験・公開デモを含めて紹介する。
2 研究開発の背景
(1)交通事故問題の現況
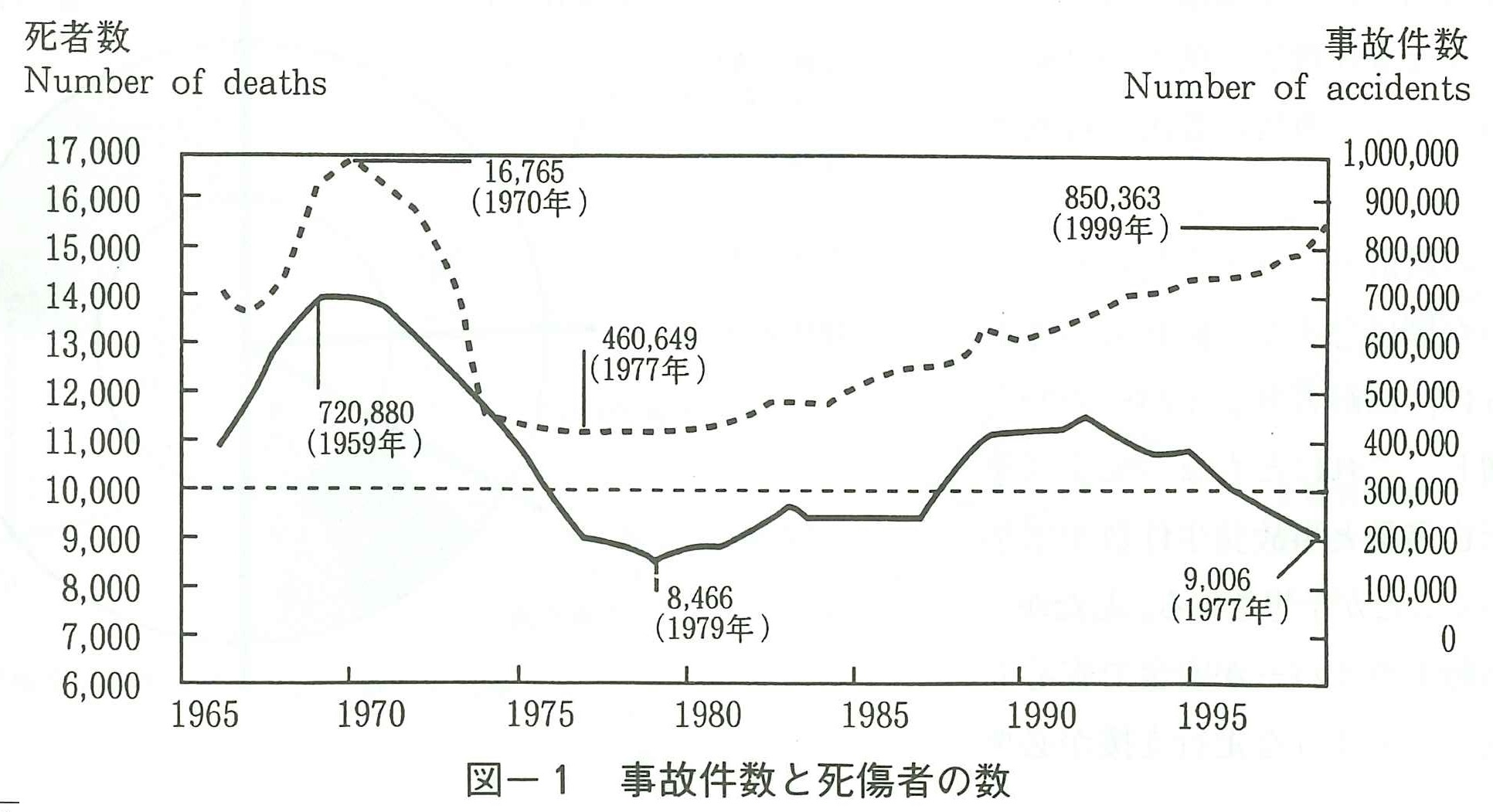
交通事故の発生は世界的に大きな社会問題であり,IRTAD(International Road Traffic and Accident Database)の推定(1996年)によると,全世界で年間50万人が交通事故により死亡し,米国では年間約4万人,欧州では約5万人が死亡している。日本においては,図ー1に示すとおり,ここ20年間の事故死者数は年間1万人前後で推移しているが,事故件数は増加傾向にある。総務庁データに基づく社会的損失額として試算すると,交通事故による社会的損失額は3兆8,000億円に達する。
高齢者の人口は平成10年(1998年)2月に2,000万人を超え,総人口の16.2%を占めている。国立社会保障・人口問題研究所の推計によると,高齢者人口は今後も増加を続け,平成27年(2015年)には3,188万人(同25.2%)と総人口の4人に1人は高齢者になると見込まれている。それに伴い,高齢者の運転免許保有数も増加してきている。さらに,自動車運転中に引き起こす死亡事故の頻度について,運転免許保有者数当たりおよび走行距離(走行台キロ)当たりで年齢層別に比較すると,高齢者ドライバーは25~64歳のドライバーの1.28倍である。また,走行台キロに対する死亡事故率で見ると,25~64歳までのドライバーの事故率が1.15人/億台キロであるのに対し,高齢ドライバーの事故率は2.83人/億台キロであり,25~64歳までのドライバーの約2.5倍と高齢者が引き起こす死亡事故は高い水準にあることが理解される。
一般的に言えば,高齢者は,暗い所での視力の低下,視野の狭小化,動体視力の低下など視覚機能が低下する傾向にあり,またブレーキ反応時間も長くなる傾向にある。このような身体機能の低下が高齢ドライバーによる事故の要因と推察される。
以上の統計やデータを見ると,今後のわが国は急速な高齢社会の進展とともに,高齢者ドライバーの割合が急増し,これにともなって交通事故の死亡者数と事故発生件数が増加していくことが予想される。したがって,高齢ドライバーが安全で安心して運転できるような走行支援が必要といえる。
(2)走行支援システムのコンセプト
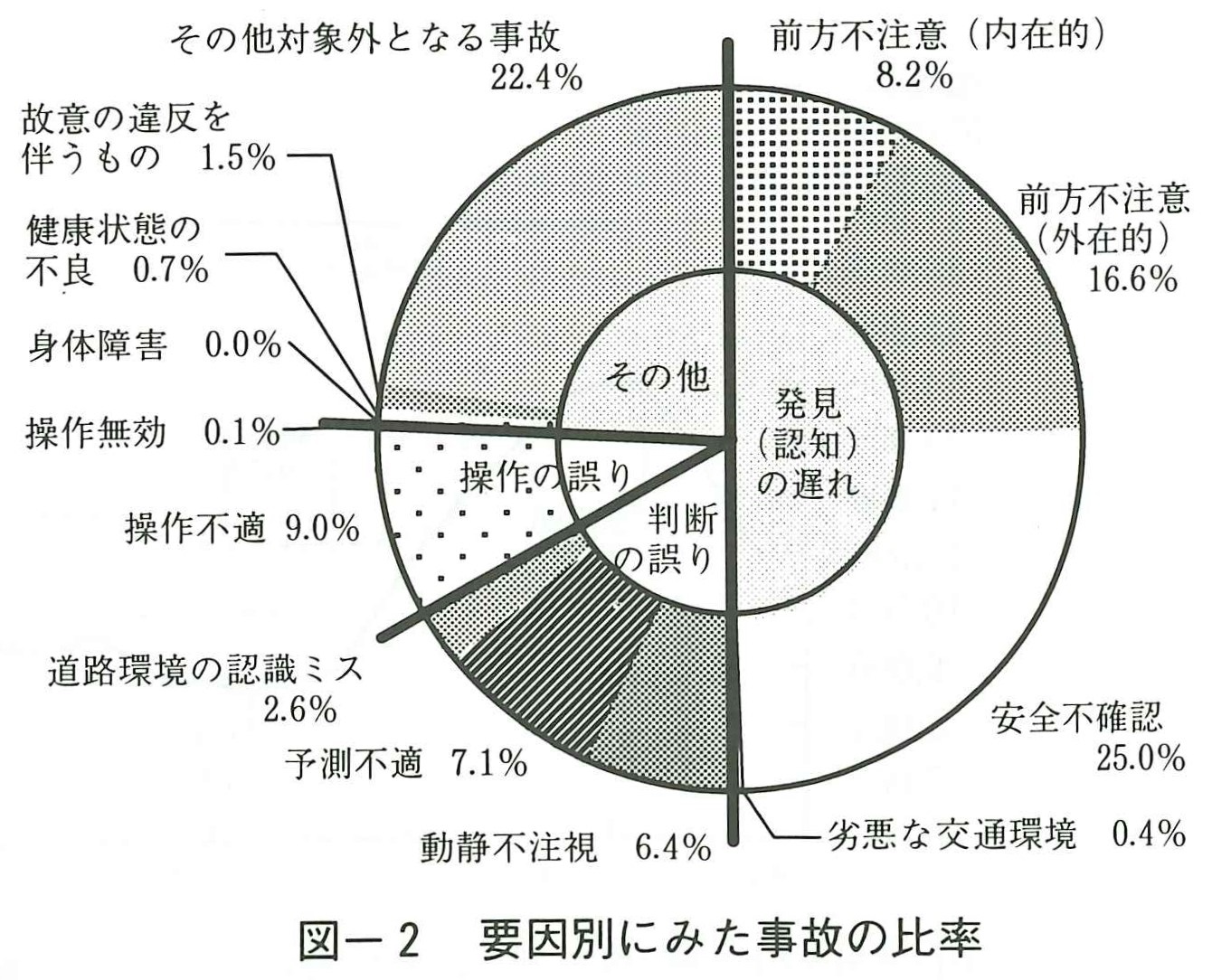
次に事故を要因別に分類してみると,図ー2から分かるように,発見の遅れ,判断の誤り,操作の誤りを原因とした事故が全体の4分の3を占めていることが分かる。従って,これらの要因を取り除くことができれば,大幅な事故削減が期待できる。走行支援システムは,これら発見の遅れ,判断の誤り,操作の誤りを未然に防ぐことによって,事故を回避することを甚本コンセプトとしている。すなわち,発見の遅れに関しては情報提供,判断の誤りに関しては警報,操作の誤りに関しては操作支援を行うことにより,事故回避の支援を行うものである。
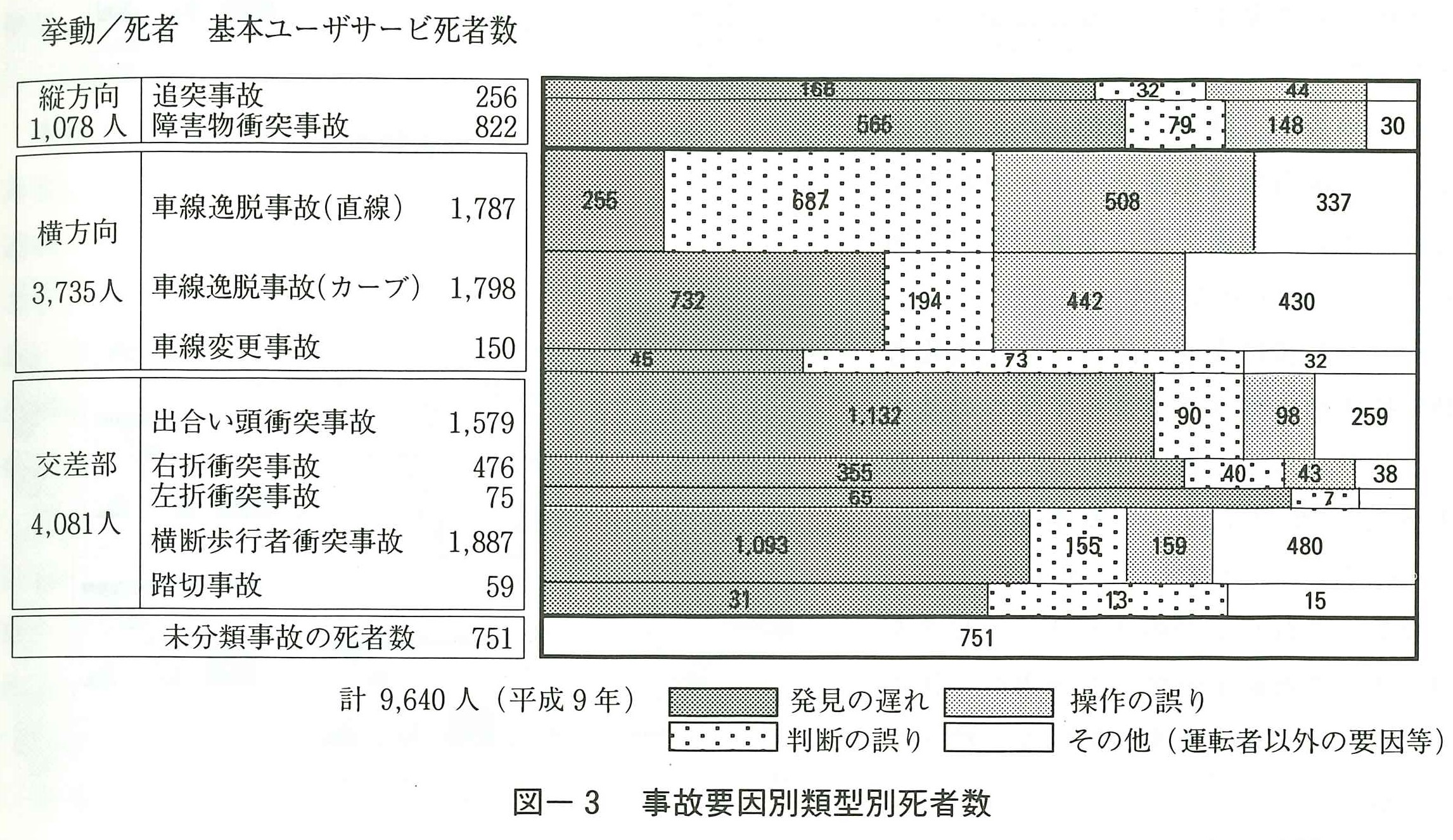
図ー3に事故要因別・類型別の死者数を示す。事故類型は大きく分けて単路における事故と交差点における事故の二つに分類される。事故要因は発見の遅れ,判断の誤り,操作の誤りのおよびその他に分類される。この図から,車線逸脱事故,障害物衝突事故,および歩行者事故が死亡事故の多い事故類型であることが分かる。そして,追突事故,障害物衝突事故,車線逸脱事故,出合い頭衝突事故,右折衝突事故および横断歩行者衝突事故を合わせると全体の90%以上を占めることが分かる。
(3)システム構成
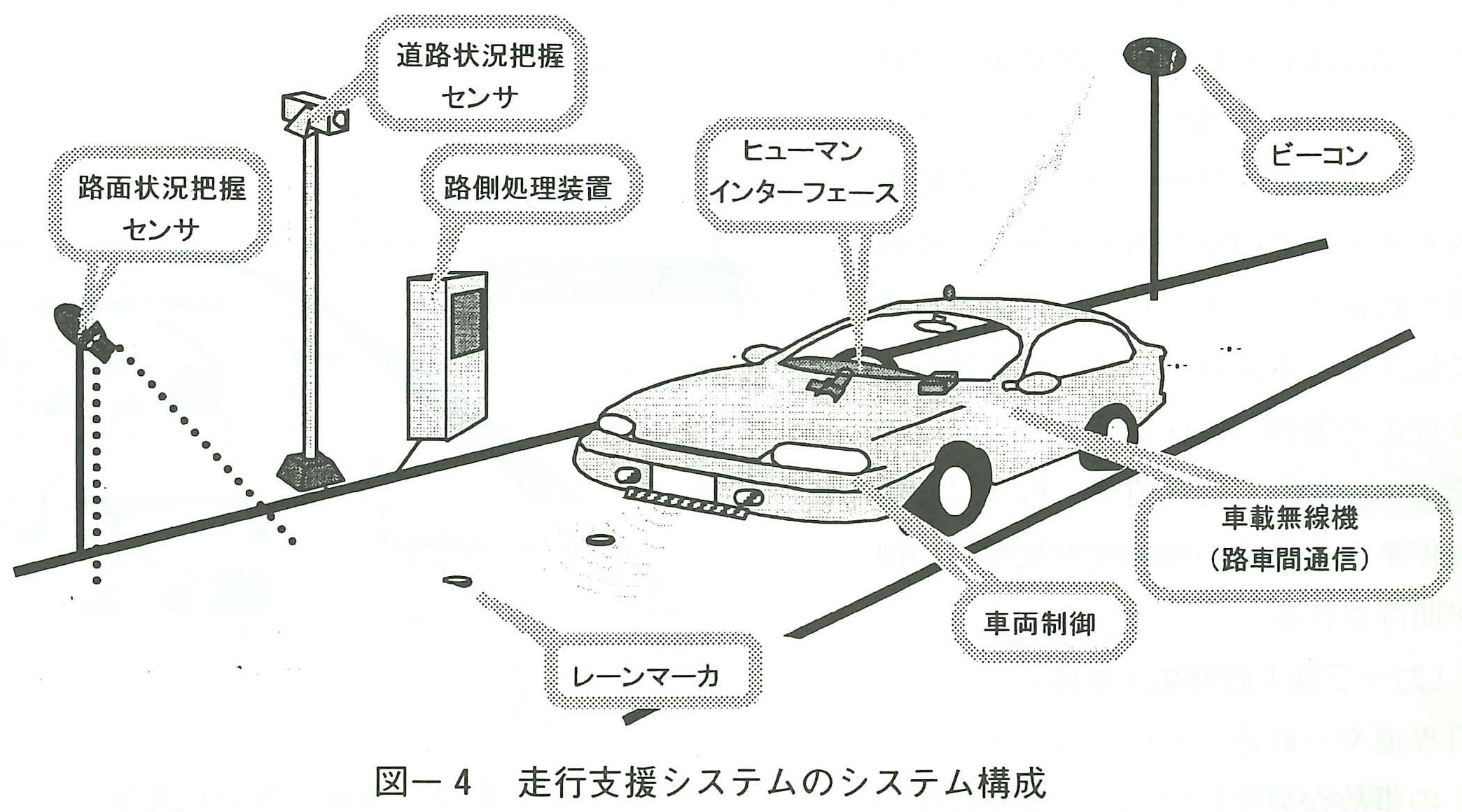
走行支援システムのシステム構成を図ー4に示す。まず,道路状況把握センサによって道路上の障害物や停止車両の存在を検出,路面状況把握センサによって路面状況を検出し,これらの情報を路側処理装置に収集する。路側処理装置はこれらの情報を車側に与える情報に加工し,通信機器(ビーコン)を通じて,情報は車に送信される。車はビーコンから受信した路側からの情報と,レーンマーカから得た位置情報および自車両の速度等のデータを元に,サービス提供タイミングを自ら判断し,適切なタイミングでドライバーにサービスを提供する。
3 基本ユーザサービス
我々は,最小限のシステムパターンによって最大限の効果を上げるために,基本ユーザサービスを選定した。
まず,第1ステップとして,交通事故の要因別の分類を行った。これによって前述の通り,事故の4分の3は発見の遅れ,判断の誤り,操作の誤りのいずれかを要因として発生していることが明らかとなった。
次に事故を形態別に分類した。これによって,前方障害物衝突防止や車線逸脱防止,出合い頭衝突防止支援が重要であることが明らかとなった。
そして最後に交通事故による事故死者数や損失額の大きさによって7つの基本ユーザサービスの選定を行った。図ー5(1)~図ー5(7)に7つの基本ユーザサービスのサービスイメージ図を示す。
なお,これら7つのユーザサービスを導入することによって,交通事故全体の50%を削減することを長期的な目標としている。
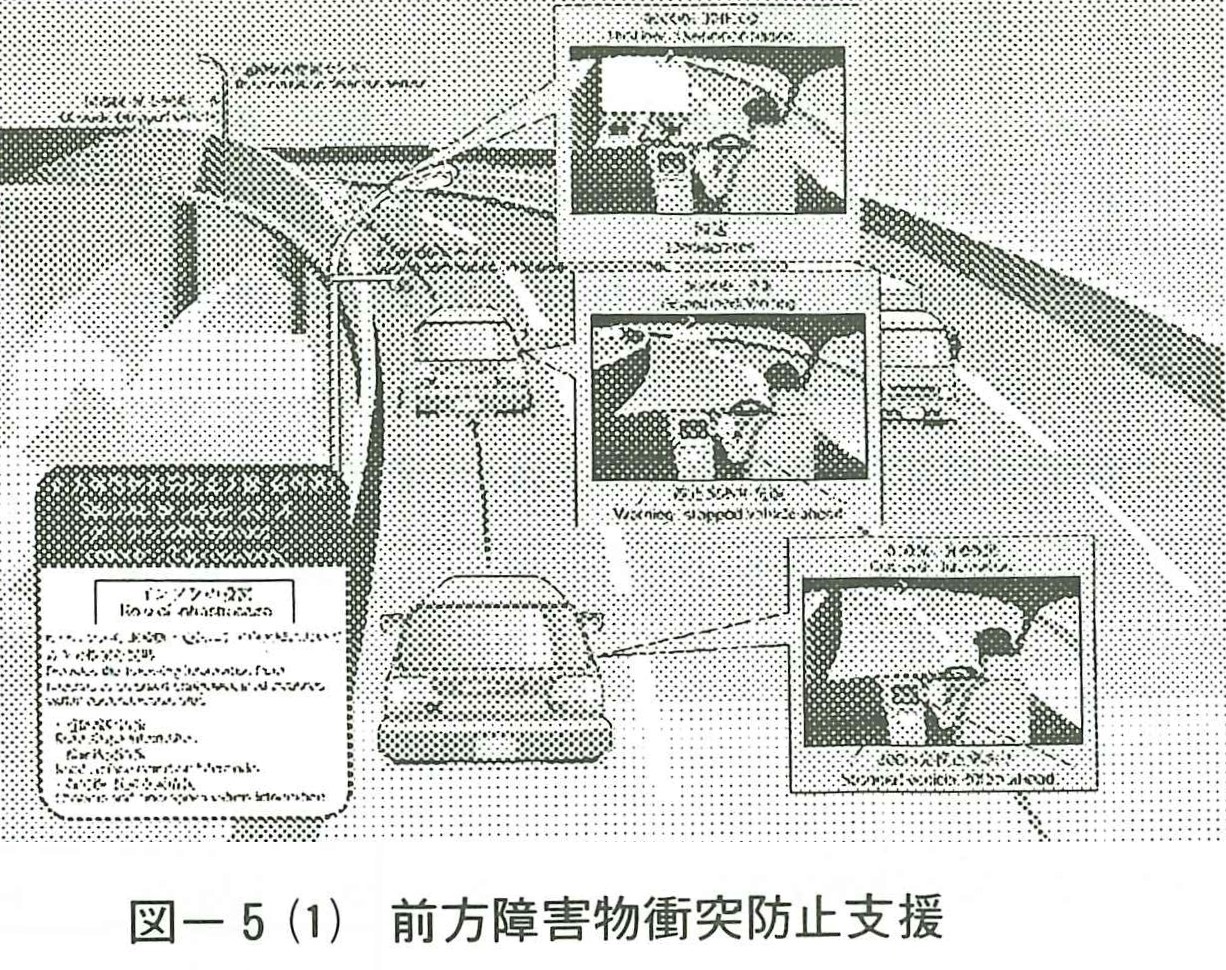
(前方障害物衝突防止支援)
自専道では障害物衝突や追突事故が全体の7割に達しており,事故対策が急務となっている。見通しが悪いカーブ等において,道路インフラ(センサ)が停止車両や落下物等の障害物を検知し,その情報を路側アンテナ(ビーコン)から車両に伝える。車両はドライバーに対して情報提供や警報,操作支援を行う。このサービスにより,自専道や一般道における駐停車中の車両への追突事故などの削減が期待される。
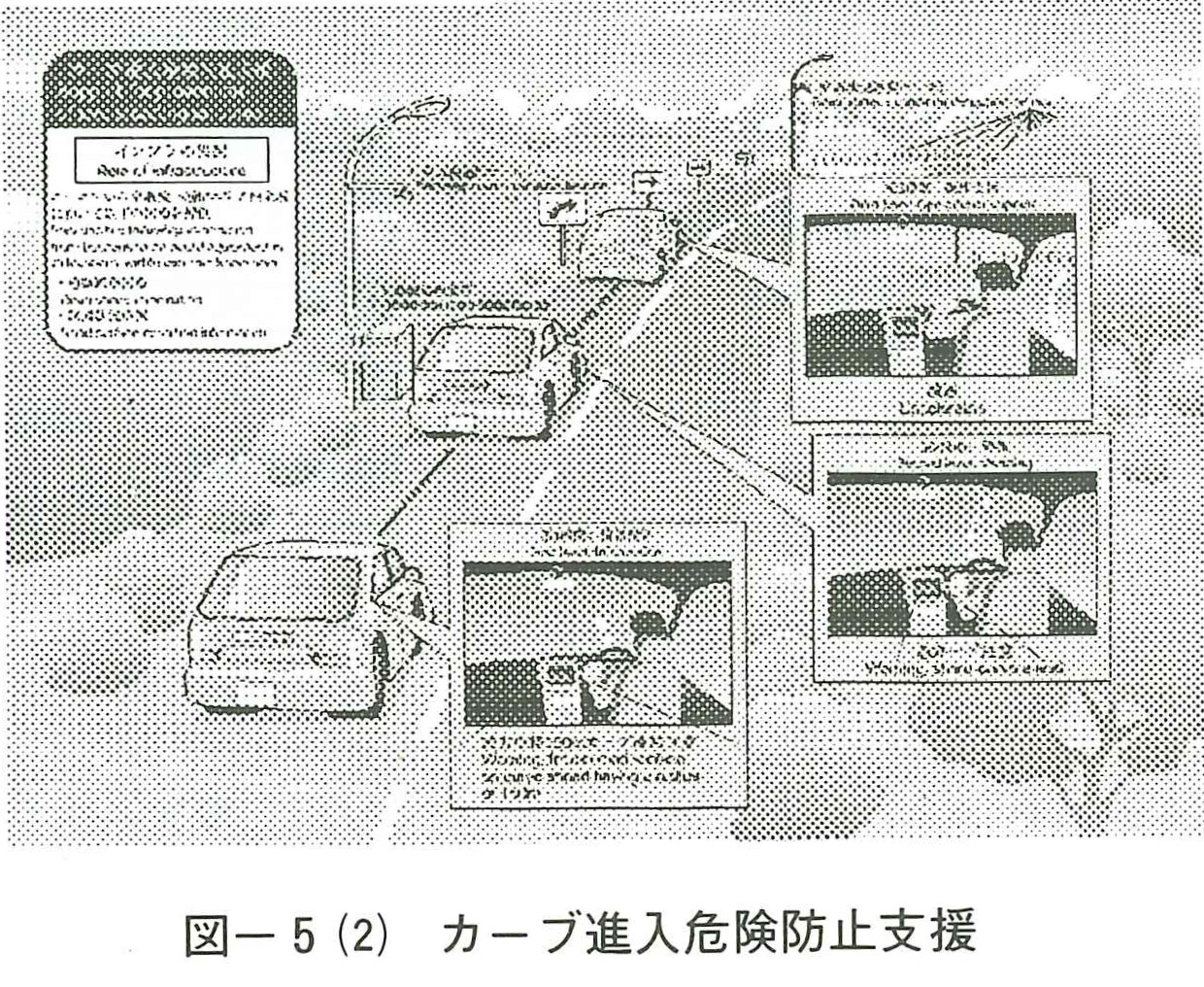
(カーブ進入危険防止支援)
自専道や一般道においては,カーブで多くの事故が発生しており,事故対策が急務となっている。カーブの手前において,路側アンテナ(ビーコン)がカーブまでの距離やカーブ形状を車両に伝える。車両はドライバーに対し,情報提供や警報,操作支援を行ない,安全にカーブを曲がれるようドライバーをサポートする。このサービスにより,自専道や一般道におけるカーブの正面衝突事故やすれ違い衝突事故,車線逸脱事故の削減が期待される。
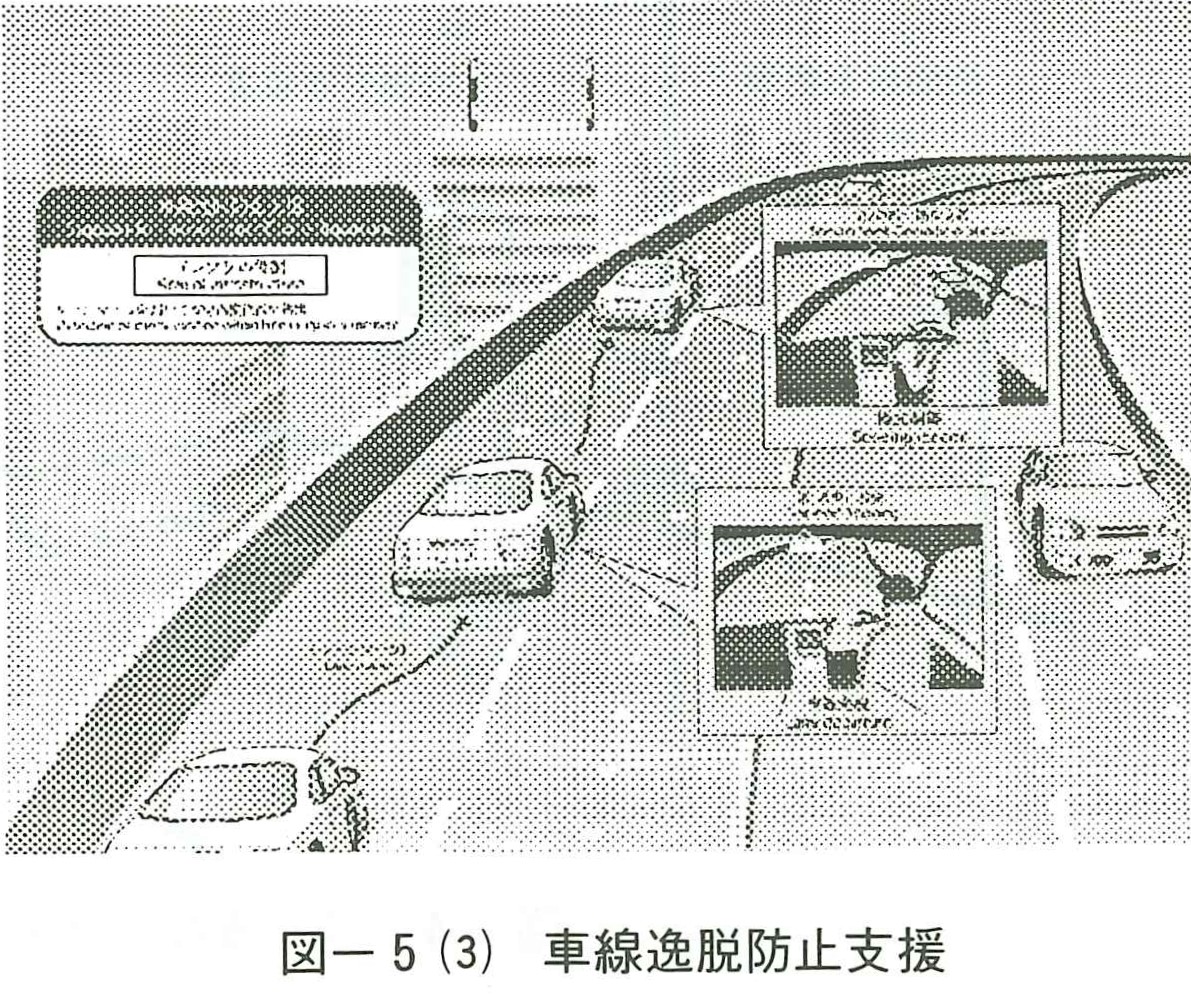
(車線逸脱防止支援)
車線逸脱事故の致死率は全体に比べて非常に高く事故対策が急務となっている。道路の路面に設置されたレーンマーカにより,車両が車線内の位置情報を検知する。車両が走行車線を逸脱しそうになった時はドライバーに対し警報,操作支援を行う。
このサービスにより,自専道や一般道における直線の正面衝突事故やすれ違い衝突事故,車線逸脱事故の削減が期待される。
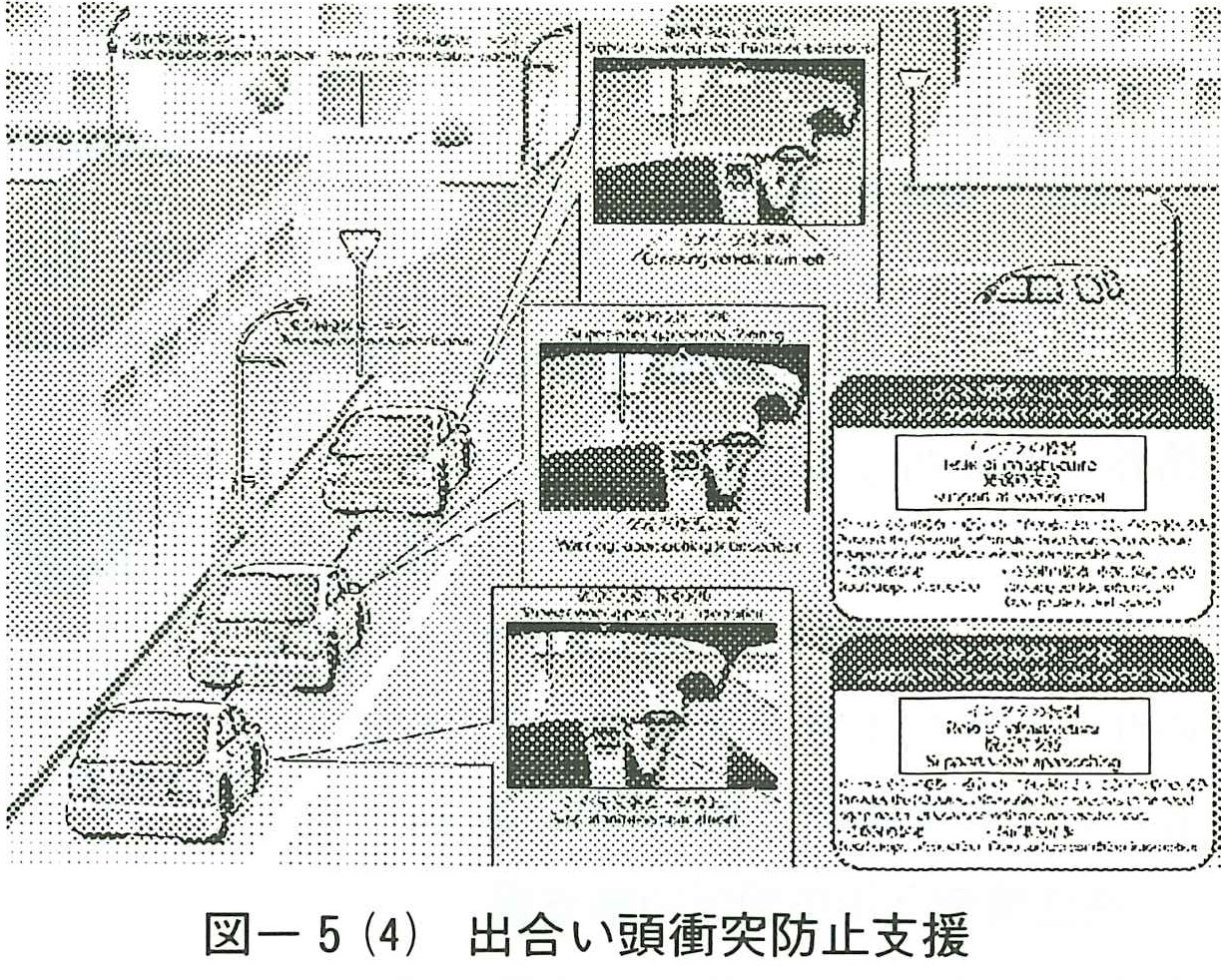
(出合い頭衝突防止支援)
従道路において交差点に接近する車両に,交差点の存在を伝える。また,発進しようとする車両に対して,道路インフラ(センサ)が接近する車両を検知し,その位置やスピード等の情報を路側アンテナ(ビーコン)により車両に伝える。車両はドライバーに対じ情報提供を行う。このサービスにより,交差点における出合い頭衝突事故の削減が期待される。
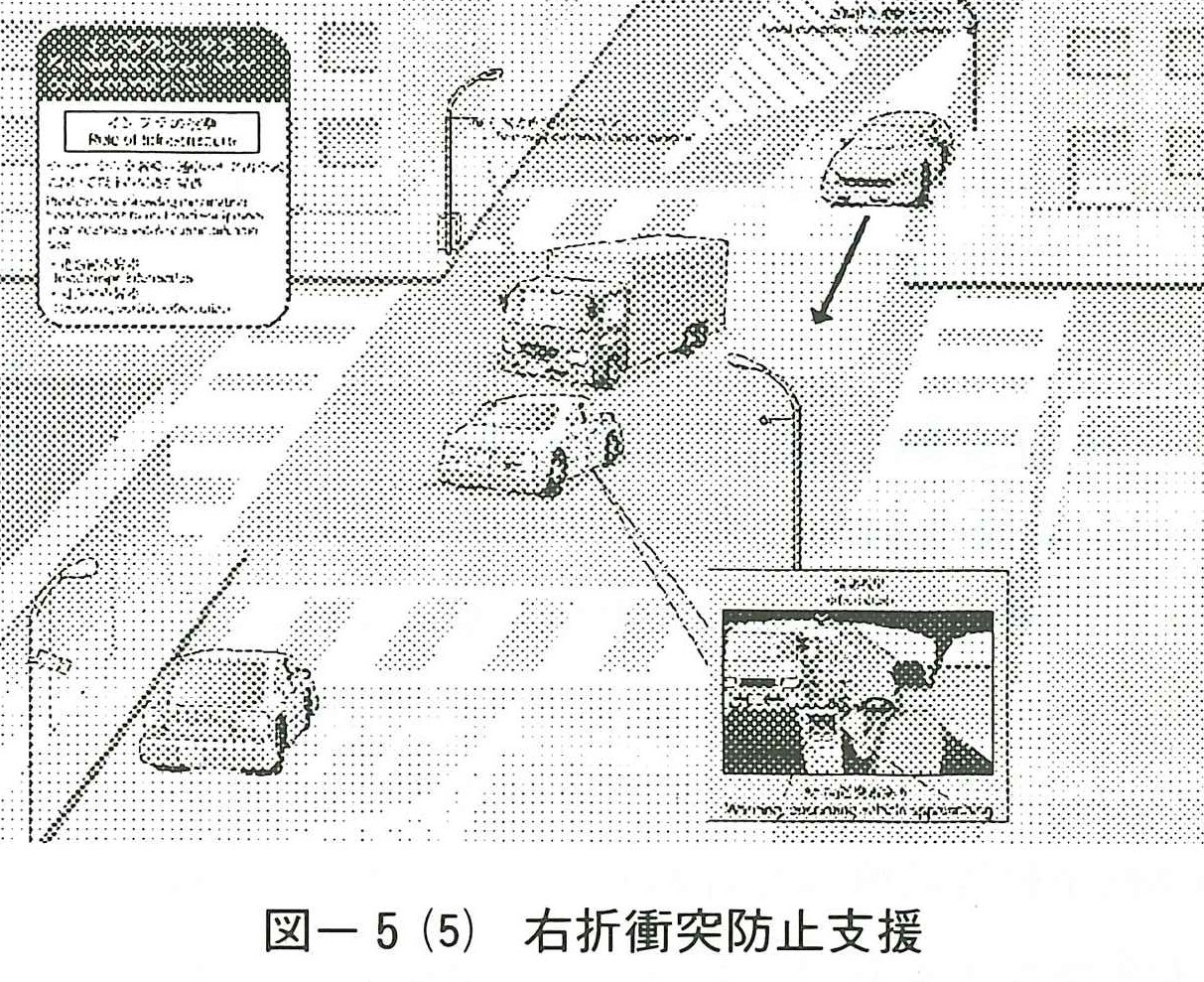
(右折衝突防止支援)
交差点において,道路インフラ(センサ)が対向車線を接近してくる車両の位置やスピードを検知し,路側アンテナ(ビーコン)からその情報を右折しようとする車両に伝える。車両はドライバーに対し情報提供を行う。このサービスにより,交差点における右折時衝突事故の削減が期待される。
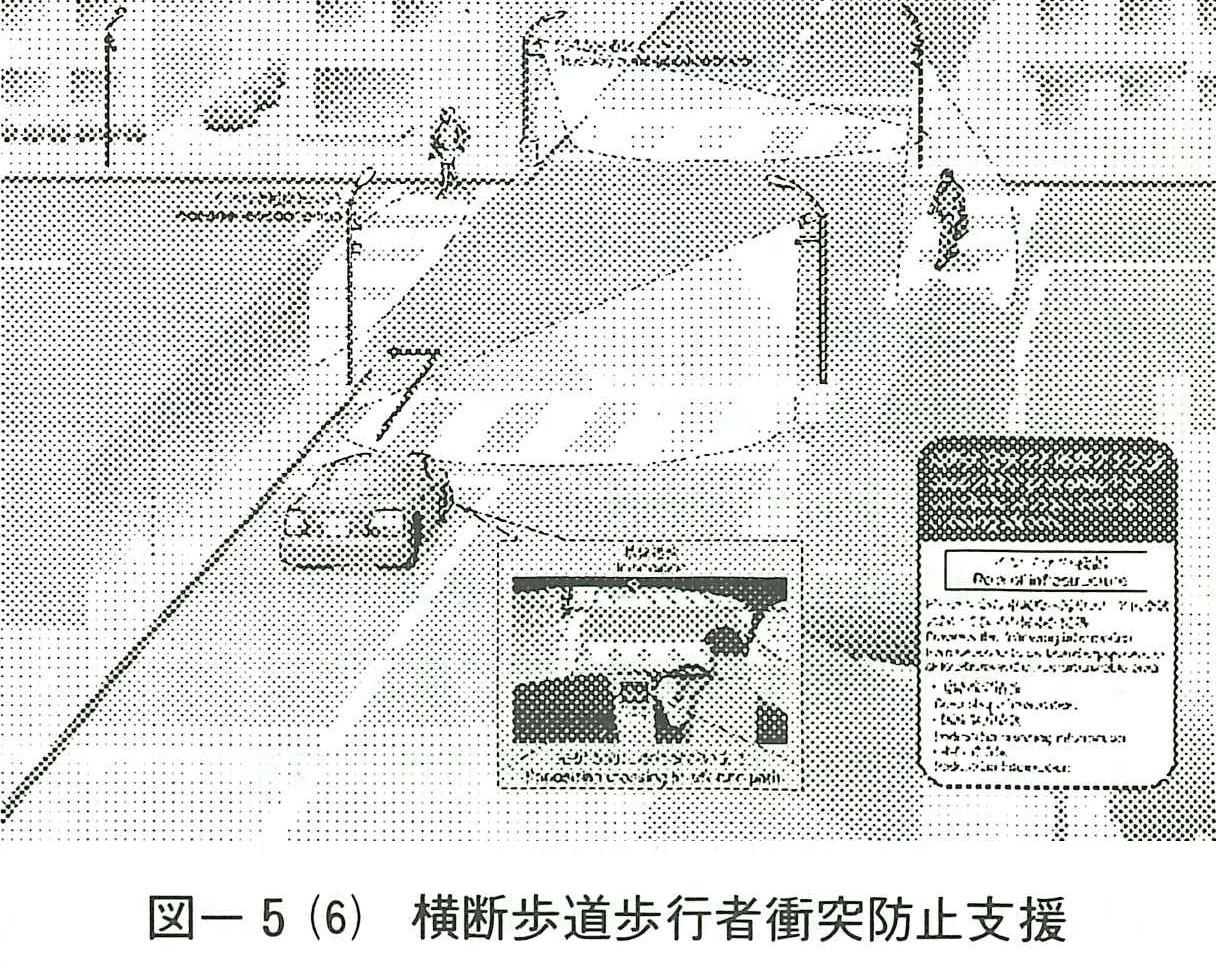
(横断歩道歩行者衝突防止支援)
交差点において,道路インフラ(センサ)が横断歩道上の歩行者を検知し,その情報を右左折しようとしている車両に路側アンテナ(ビーコン)から伝える。車両はドライバーに対し情報提供を行う。このサービスにより,交差点横断中の歩行者に対する事故の削減が期待される。
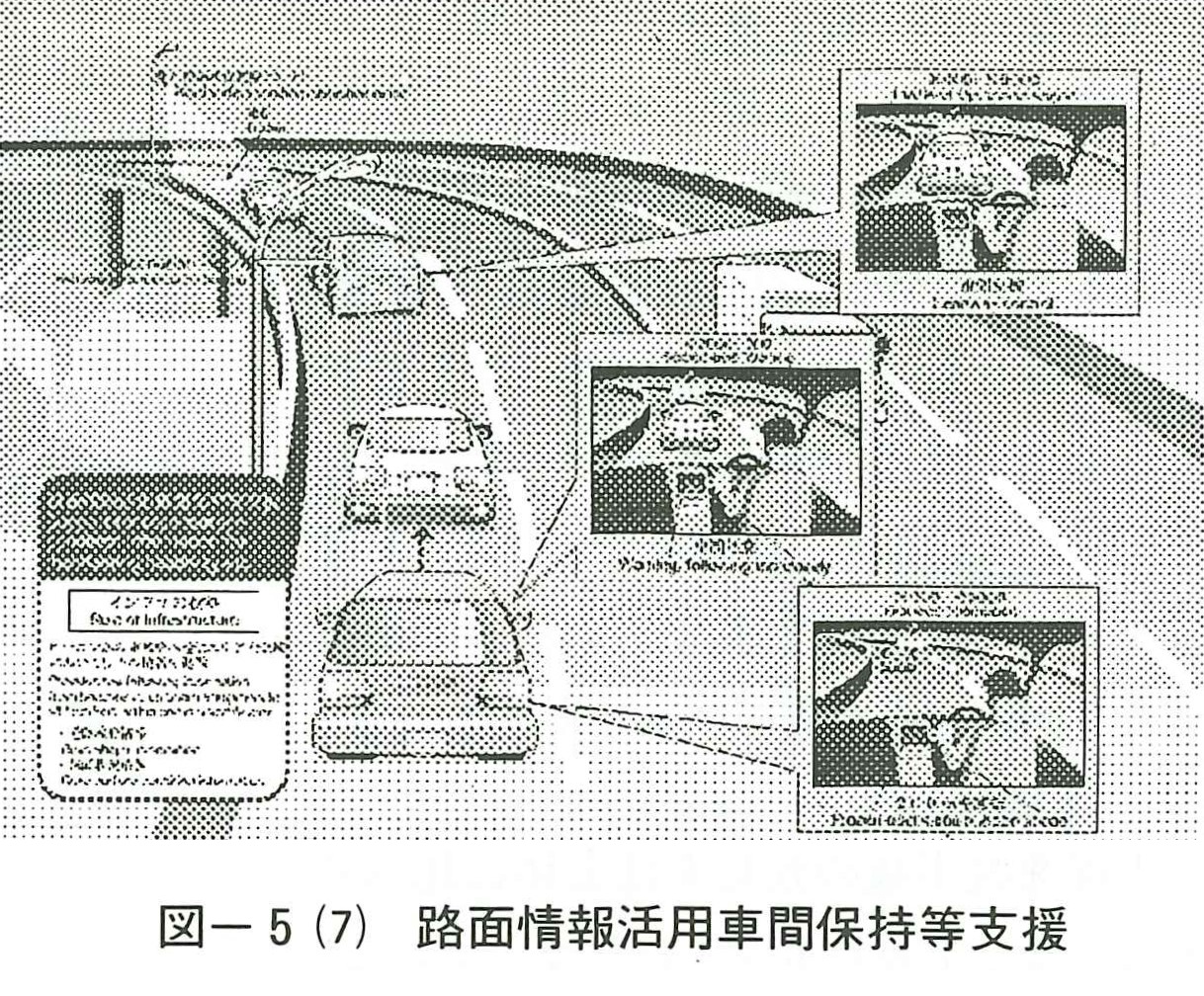
(路面情報活用車間保持等支援)
道路インフラ(センサ)が道路の路面状況(凍結,水膜,積雪など)等を把握し,路側アンテナ(ビーコン)により車両に伝える。車両はその情報をドライバーヘの伝達や,車間保持サービスに活用する。このサービスにより,追突事故の削減が期待される。
4 実証実験および公開デモ
(1)実証実験
実証実験は大きく3つの事項を検証するために実施された。一つは,システムの検証である。すなわち,我々のシステム設計が実際のドライバーの運転挙動等に照らし合わせて妥当であったかどうかを検証するものである。二つ目はドライバーの受容性からの評価である。提供されるサービスの内容(情報内容および提供頻度など)がドライバーにとって受け入れられるものであるかどうかを検証するものである。三つ目はサービスの有効性検証である。サービス提供による事故回避の効果をサービス提供の有無によるドライバーの走行挙動(反応遅れ時間,減速度,操舵角など)の比較を通じて検証するものである。この実験は設定条件によっては危険を伴うため,一部はドライビングシミュレータを使った模擬実験で検証を行った。
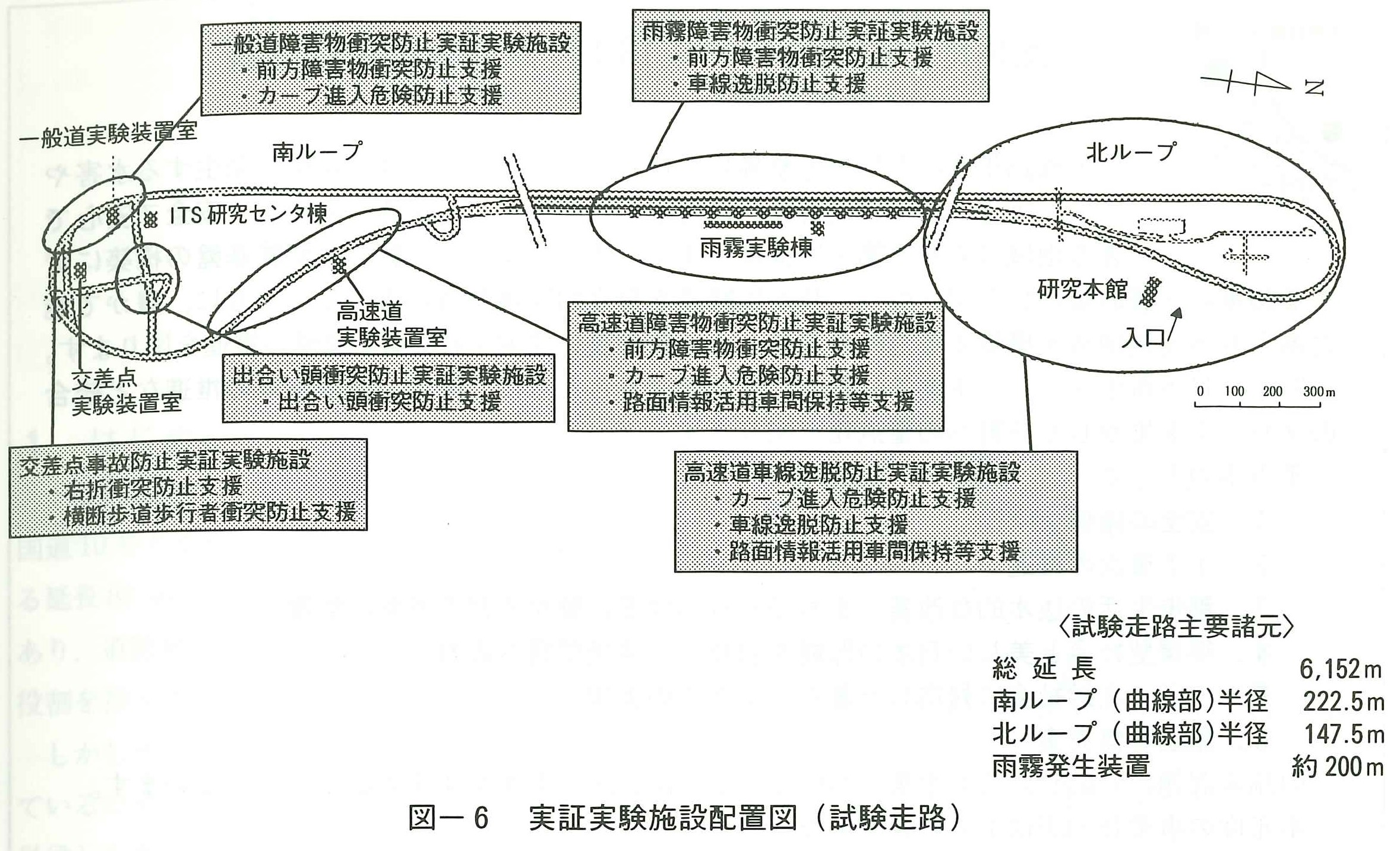
実証実験システムは,国土交通省国土技術政策総合研究所(旧建設省土木研究所)のテストコースに設置された。図ー6に実証実験システムの配置を示す。実証実験のサイトは大きく3つに分けられる。一つは南ループである。ここでは,単路において実施されるサービスとしては前方障害物衝突防止支援およびカーブ進入危険防止支援が実施された。また,交差点系の3サービス,すなわち出合い頭衝突防止支援,右折衝突防止支援,横断歩道歩行者衝突防止支援がループ内に整備された二つの交差点を利用して実施された。
二つ目は直線路および北ループである。ここでは単路系のサービスとしてはカーブ進入危険防止支援,車線逸脱防止支援,および路面情報活用車間保持等支援が実施された。三つ目は雨霧実験施設内である。ここでは雨霧による見通し不良時の前方障害物衝突防止支援および車線逸脱防止支援が実施された。
なお,実証実験に参加した企業・団体等は,インフラシステムの設計者であるAHS技術研究組合,ASV(先進安全自動車)の研究開発者である国内自動車メーカ13社,および公募に応じた国内外の機関である。
(2)公開デモ
平成12年11月28日(火)~12月1日(金)の4日間,国土技術政策総合研究所,㈶日本自動車研究所,ならびに,つくば国際会議場において走行支援システムの公開実験「スマートクルーズ21 Demo 2000」が開催された。初日の28日(火)には,森田・旧運輸大臣,田村・旧建設政務次官をはじめ,海外12カ国からの参加者を含め,300名を超える関係省庁,民間企業,マスコミなどの参加を得て,国土技術政策総合研究所において開会式が盛大に行われた。
開会式では,森田・旧運輸大臣から「先進自動車と走行支援道路システムが協調することで交通事故による死傷者が減少することを心から期待しています。来年以降,国土交通省となることで一層協力が深まると思います。」というご挨拶があった。また,田村・旧建設政務次官からは,「わが国の政府がこれからも一致協力して,世界に誇れる“走行支援システム”という新しい技術を完成することを期待しています。」というご挨拶があった。
開会式終了後,参加者代表によるテープカットが行われ,引き統き,体験乗車が行われた。
なお, 期間中のデモ参加人数は延べ約2,400 人であった。
5 結びに
走行支援システムのイ ンフ ラシステムは,旧建設省が推進しているスマートウェイインフラの中核をなすものである。すなわち,走行支援システムのために整備されるインフラは.単に走行支援を実現するだけではなく,様々なアプリケーションを実現するための共通的なインフラ,すなわちI T S実現に不可欠なプラットフォー ムとして整備されるのである。したがって,走行支援システムの道路インフラは他のサービスとの互換性や拡張性に配慮して整備していくことが必要である。そのため,今後は技術研究開発と並行して導入効果の明確化,実用化に必要な制度・基準類の検討,インフラの整備やシステム機能の拡張等に関する展開計画の策定,国際標準化や国際交流の推進に積極的に取り組んでいくことが重要であると考える。
<参考文献>
1)㈶交通事故分析センター:交通統計(平成11年版)
2)国際道路交通事故データペース (IRTAD)(1995年)
3)Masafumi Mori: Advanced Cruise-Assist Highway Systems, The 7th ITS World Congress, 2000.
4)Yasushi Tanaka : Summary of the Proving Tests for the Advanced Cruise-Assist Highway System (Smart Cruise 21) and Evaluation Plan, The 7th ITS World Congress, 2000.
