
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ情報技術(IT)とロボット技術(RT)を活用した建設技術の開発
一(独)土木研究所先端技術チームのとりくみの紹介一
一(独)土木研究所先端技術チームのとりくみの紹介一
(独)土木研究所 技術推進本部
先端技術チーム 主席研究員
先端技術チーム 主席研究員
山 元 弘
(独)土木研究所 技術推進本部
先端技術チーム 主任研究員
先端技術チーム 主任研究員
山 口 崇
1.はじめに
現在の独立行政法人土木研究所(土研)は,平成13年度に,国土交通省の旧土木研究所の一部が独立行政法人に移行したものである。国の研究機関としては,国土技術政策総合研究所(国総研)に移行した。国総研では,政策研究と国が自ら行うべき研究等を実施し,土研では,民間で実施が担保されない研究等を実施することとされている。土研の研究部門は,7つの研究グループとユネスコセンター設立推進本部,技術推進本部等から成る。17年度は最初の中期計画(5箇年)の最終年となっている。次期中期計画では,北海道開発土木研究所との統合が予定され,またユネスコセンターは世界の水問題(災害と資源)での活動が期待されている。
技術推進本部は,成果や技術の評価・普及,知財権,横断的な分野の研究開発を担い,このうち先端技術チームは,旧機械研究室の一部が移行したものであり,機械や情報技術などの先進技術を活用する建設生産・維持管理技術の高度化を担当している。
先端技術チームの取組は,建設工事に伴う環境影響評価技術(騒音・振動・粉塵等),建設機械排出ガス評価技術,機械設備等の設計・維持管理の高度化(計算流体力学活用・設備信頼性SUS腐食・素地調整等),建設施工の情報化・ロボット化等がある。
施工の情報化は,地道に着実に進めるものであるが,特にデータ交換に着目して,追加・保守が容易な「標準」のあり方を検討し,土工機械のISOへの反映,施工・維持管理での活用を目指している。
ロボット化は,基本的には,維持管理危機管理「建設生産工学」的な立場からの,遠隔や一部自律化を考えている。ここでは,このうち総プロでのロボット技術の活用についての取組を中心に紹介する。
2.ロボット等によるIT施工システムの開発について
2-1 全体概要
我が国の土木施工においては,災害復旧現場,地下空間,トンネル,がけ地,土壌汚染の工事などで,危険・苦渋作業がいまだに多く存在しており,これらの劣悪な作業環境を改善し,安全を確保することが喫緊の課題となっている。これまでも施工の安全対策のため,一部で遠隔操作方式の無人化施工の技術開発が進められてきた。しかし,有人施工と比較して作業効率が低く高コストであり,災害復旧現場等の大規模で特殊な施工現場への限定した適用にとどまってきた。また,現在,建設現場では就業者の高齢化が進展しており,今後,若年労働力不足や熟練者不足等の課題に対処していく必要がある。
そのため,最先端のIT・ロボット技術を活用し,現在行われている災害復旧現場等における施工効率を向上させるとともに一般の施工現場においても低コストで容易に利用可能な作業支援システムや建設機械による施工の自動化技術などの開発が求められている。
また,一般施工現場においても,例えば人力による2次元的な計測,データの紙による管理が行われるなど,他産業に比べてIT導入が遅れており,業務の効率化,コスト低減,品質向上のための技術開発が求められている。
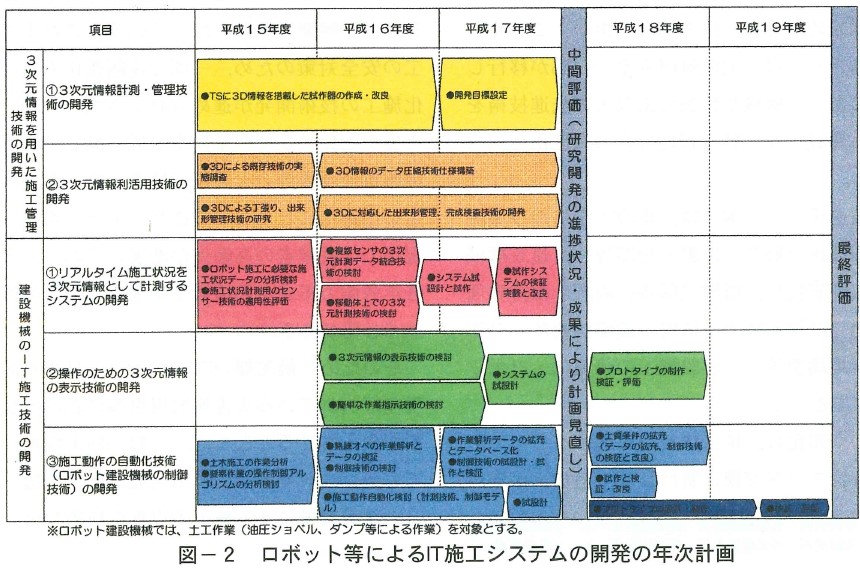
そこで,国土交通省では,平成15年度より平成19年度までの5ヵ年の計画で総合技術開発プロジェクトとして「ロボット等によるIT施工システムの開発」を実施している。このプロジェクトでは,土木施工における危険・苦渋作業の解消や熟練者不足への対応,現在の2次元図面や測量計算書等による非効率な作業の改善などの課題に対処するため,建設機械のIT施工技術の開発および3次元情報を用いた施工管理技術の開発を行っている。
なお,本プロジェクトは,総合科学技術会議(内閣府)の科学技術連携施策群における「次世代ロボット」の個別施策に位置づけられている。科学技術連携施策群は,各府省の縦割りの施策に横串を通す観点から,国家的・社会的に重要であって関係府省の連携の下に推進すべきテーマを定め,積極的な推進を図ることとされている。
また,平成15年から平成19年までの5ヵ年を計画期間として国土交通省の技術研究開発の方向性を明らかにした「国土交通省技術基本計画」(平成15年11月)において,重点的に実施する研究開発テーマである10の重点プロジェクトの1つとして「建設ロボット等による自動化技術の開発一建設事業からの危険・苦渋作業の解消を目指す一」が位置づけられている。
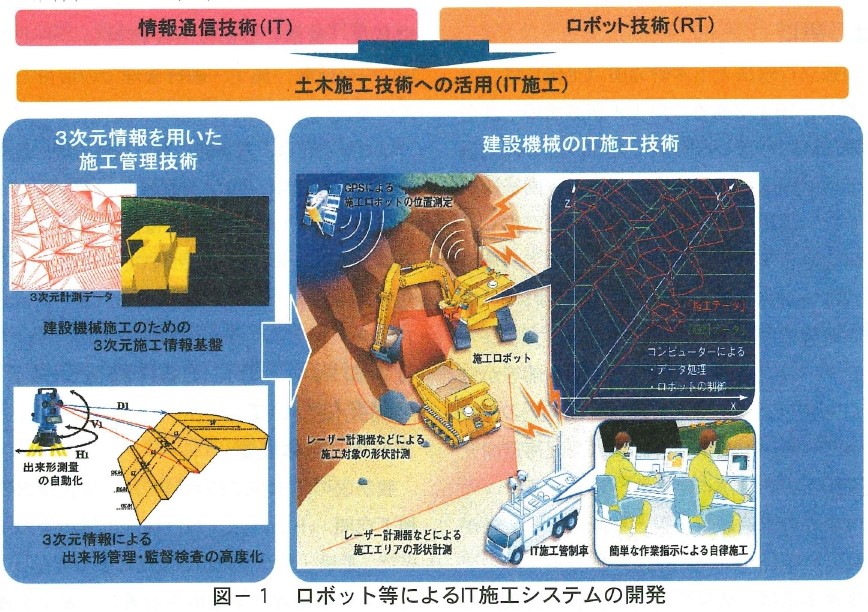
(1)3次元情報を用いた施工管理技術の開発
ITやロボット技術を活用し,施工効率を向上するためには現地の3次元情報を電子情報でとらえて,2次元情報(2次元の図面等)を介することなく直接伝達し,管理する高度な技術が不可欠である。本研究では,3次元設計情報と3次元地形情報により,効率的な施工管理を行う技術を開発する。得られた成果は,建設機械のIT施工技術の開発に資するとともに全国の一般施工現場での測量設計,工程管理等業務にも応用することができ,土木施工業務の効率化,コスト縮減,品質向上を図ることができる。
なお,本研究開発は,国土技術政策総合研究所情報基盤研究室において,実施されている。
(2)建設機械のIT施工技術の開発
建設機械のIT施工技術の実用化を目的として,その基盤となる要素技術を開発する。具体的には,3次元設計情報と施工状況により変化する3次元地形情報を操作画面上に表示し,画面上で作業位置や作業内容などの簡単な指示情報を与える技術を開発する。さらに,これを通常の建設機械における施工効率を向上させるための作業支援システムとして導入するとともに,ITやロボット技術を活用して施工を自動的に行う油圧ショベル等のロボット建設機械によるIT施工技術の開発を目指すものである。
なお,本研究開発は,(独)土木研究所先端技術チームにおいて,実施されている。次節では,(独)土木研究所先端技術チームが実施している「建設機械のIT施工技術の開発」について紹介する。
2-2 建設機械のIT施工技術の開発
(1)研究の対象
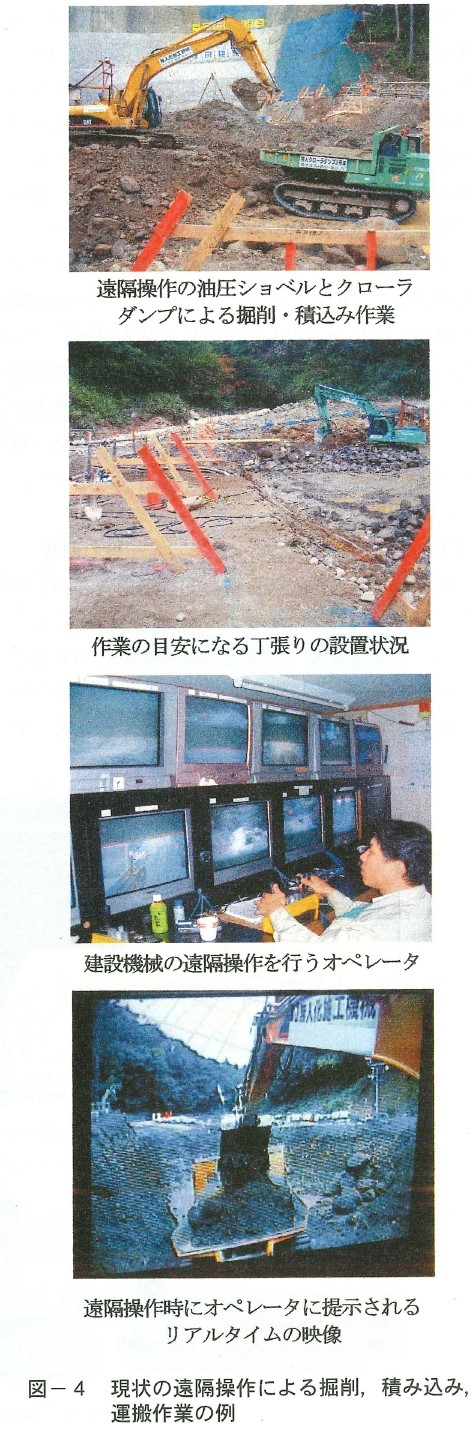
災害復旧や災害防止事業(砂防事業など)の非常に危険な工事現場の土工作業において,油圧ショベルとクローラダンプによる土砂の掘削,積み込み,運搬を行う施工工程を実現するために必要な技術(ロボット建設機械のハードウエア,ソフトウエア,施工技術(施工プロセス,作業計画を含む))を対象とする。
(2)研究の概要
平成19年度に,プロトタイプによる建設機械のIT施工技術の模擬現場における試験において油圧ショベル及びクローラダンプの組み合わせ施工を実現する。
1)第1段階として,建設機械のオペレータ(遠隔操縦等)に作業の目標(設計)と現況(地形)の3次元情報と自機の位置などを提示して,作業を支援するシステムの開発を目指す。本システムは無人化施工の現場などで早期に実用化する技術を目指す。
2)第2段階として,遠隔でオペレータが作業位置・範囲・内容などの簡単な作業指示を行うと,作業の目標(設計)と現況(地形)の3次元情報を基にある程度の自律作業を行うロボット建設機械のプロトタイプを目指す。ここで言うある程度とは,大きな岩があるなど想定外の状況が発生し自律作業が困難な場合は,オペレータが介入して遠隔操作を行うことであり,自律作業とは,油圧ショベルのバケットやブームなどの作業装置について,動作を計画し状況により計画を修正しながら掘削・積込動作を自律して行うことである。
(3)具体的な研究開発の目標
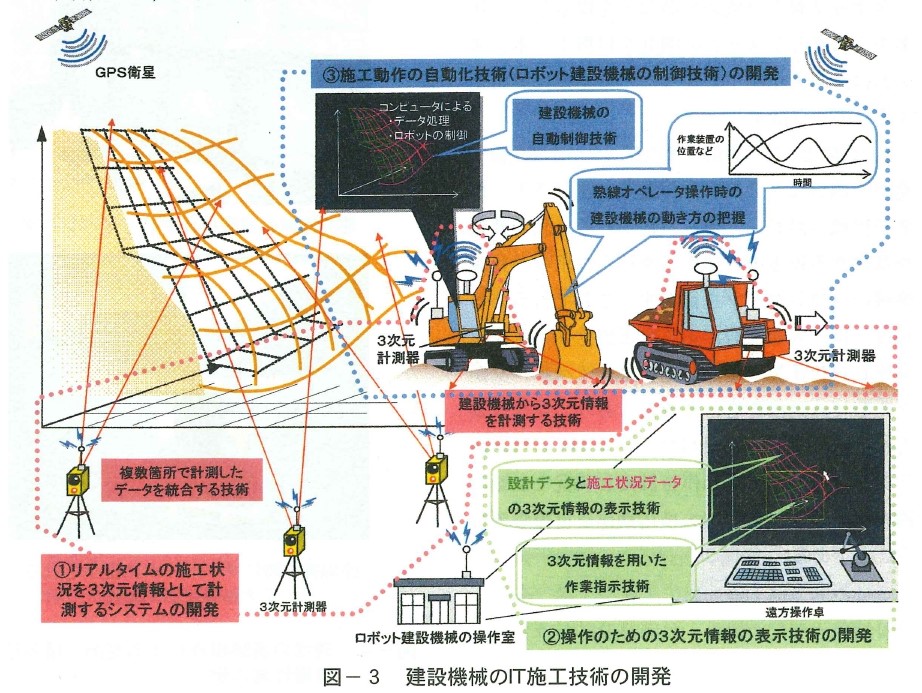
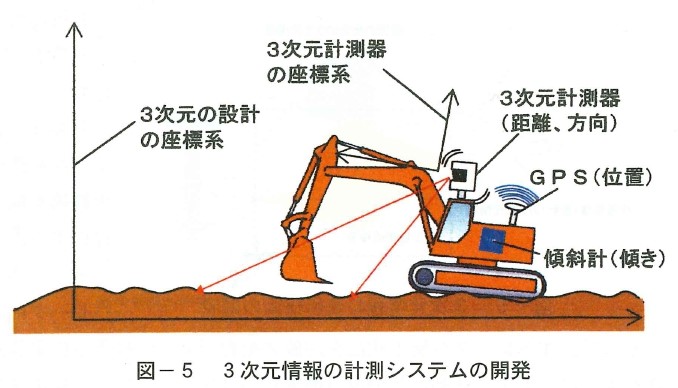
1)リアルタイム施工状況を3次元情報として計測するシステムの開発
①3次元情報の計測システムの開発
・施工エリア全体の施工状況を複数箇所から計測しデータを統合するシステムの開発
・施工対象の施工状況を移動体(建設機械)上からリアルタイムに計測するシステムの開発
2)操作するための3次元情報の表示技術の開発
①3次元情報の表示技術の開発
・施工状況データと設計データの3次元情報の表示技術の開発
・3次元情報を用いて施工範囲や施工内容などの簡単な作業指示を可能とする技術の開発
②プロトタイプシステムによる検証
・3次元情報を表示するシステム(プロトタイプ)の開発
・プロトタイプシステムによる検証
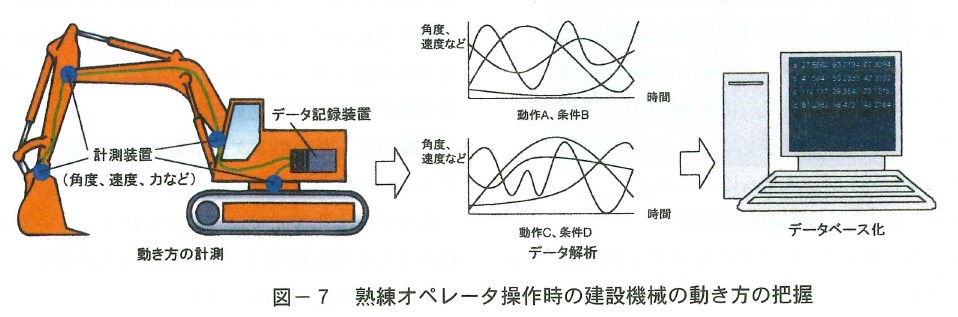
3)施工動作の自動化技術(ロボット建設機械の制御技術)の開発
①熟練オペレータ操作時の建設機械の動き方の把握
・熟練オペレータが操作する建設機械の動き方の数値化
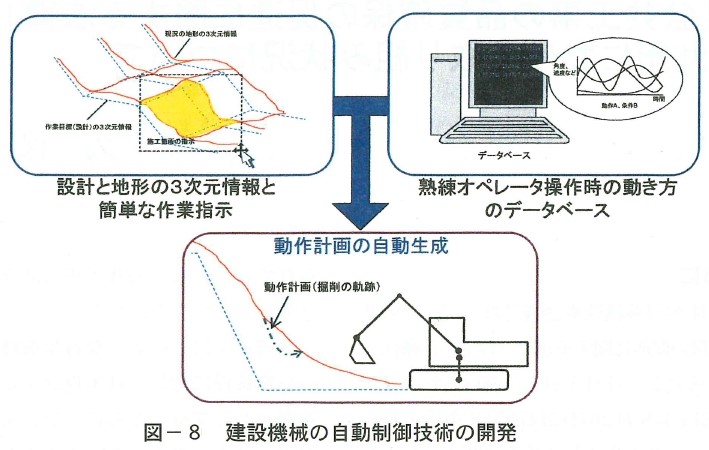
②建設機械の自動制御技術の開発
・指示情報などからロボット建設機械の動作計画を自動生成する制御技術の開発
・動作計画に基づきロボット建設機械を自動で動作させる制御装置(電子油圧制御)の開発
③プロトタイプシステムによる検証
・ロボット建設機械(プロトタイプ)の開発
・プロトタイプシステムによる検証
(4)具体的な研究開発の内容
1)リアルタイム施工状況を3次元情報として計測するシステムの開発
①3次元情報の計測システムの開発
オペレータが遠隔の操作室でロボット建設機械に作業指示を行いロボット建設機械が作業指示された施工範囲を把握するために施工エリア全体の現況の地形を3次元情報とする必要である。
そこで,広範囲の地形の3次元情報を取得するために,施工エリアの複数箇所からレーザースキャナなどの3次元計測器で計測したデータを統合する技術を開発する。
ロボット建設機械が自律作業をするには,作業の進捗を認識するために時々刻々と変化する作業中の地形の3次元情報を把握する必要がある。
そこで,作業装置が届く範囲の施工エリアの3次元情報をリアルタイムで詳細に取得するために,移動しながら作業を行い揺動するロボット建設機械上に設置したレーザースキャナなどの3次元計測器で3次元情報を計測する技術を開発する。
また,これら計測したデータと作業の目標となる設計形状のデータを比較し作業量や作業状況を把握するために,計測データを3次元計測器の座標系から施工エリアの3次元の設計の座標系へ座標変換する技術を開発する。
2)操作するための3次元情報の表示技術の開発
①3次元情報の表示技術の開発
従来の無人化施工では,施工時にオペレータに提供される視覚情報は,定置カメラと移動体上のカメラの映像だけの場合が多い。
そこで,オペレータが施工状況を的確に把握できるように,上記で計測した現況(地形)の3次元情報や目標の形状(設計)の3次元情報を重ね合わせて提示する表示技術を開発する。
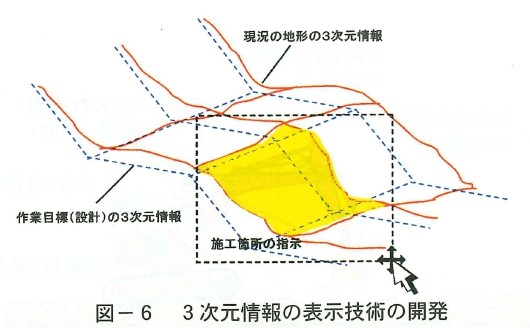
従来の無人化施工では,オペレータが常時リモコンの操作レバーで遠隔操作の建設機械の動きを制御していた。本プロジェクトの建設機械のIT施工技術では,ロボット建設機械がある程度自律した作業を行う。
そこで,上記の表示技術で提示された現況(地形)の3次元情報や目標の形状(設計)の3次元情報の画面上で,作業範囲や作業内容などの簡単な指示を行う指示技術を開発する。
②プロトタイプシステムによる検証
無人化施工の現場などで早期に実用化することを目指し,建設機械のオペレータ(遠隔操作等)に,作業の目標(設計)と現況(地形)の3次元情報と自機の位置などを提示して,作業を支援するシステムのプロトタイプを設計・製作し,模擬現場で試験を行い,機能の検証,評価を行う。
3)施工動作の自動化技術(ロボット建設機械の制御技術)の開発
①熟練オペレータ操作時の建設機械の動き方の把握
熟練オペレータの操作を真似ることで,効率的な動作ができるロボット建設機械の自動化技術を開発するために,熟練オペレータが操作する建設機械の動き方を把握する。
そのため,複数の作業条件で複数の熟練オペレータによる作業を,建設機械の作業装置の動きや作業装置先端の動き及び熟練オペレータのレバー操作量などをセンサー付の建設機械を用いて計測し,解析することで,熟練オペレータ操作時の建設機械の動き方を数値データとして抽出し,データベース化する。
②建設機械の自動制御技術の開発
施工箇所や作業内容が指示されたときに作業目標(設計)と現況(地形)の3次元情報と上記のデータベースを用いて,ロボット建設機械の作業装置の動作の計画を自動生成する制御アルゴリズムを開発する。
ロボット建設機械のベースマシンは一般の油圧式の建設機械とする。市販の機種で操作系を電子化したものはほとんど無く,通常,施工動作として作業装置の位置や機械の姿勢等を数値によって制御する機能は有していない。
そこで,上記で自動生成した建設機械の作業装置の動作の計画に従って作業装置を自動で動かすために作業装置の位置や機械の姿勢等をリアルタイムに計測しそれらを制御する制御装置を開発する。
③プロトタイプシステムによる検証
本プロジェクトで研究された技術を活用して,油圧ショベルとクローラダンプによる掘削・積み込み・運搬の土工作業を対象として,建設機械のIT施工技術のプロトタイプシステムを設計・製作し,模擬現場で試験を行い,機能の検証,評価を行う。
3.おわりに
「建設ロボット」は,昭和の終わり頃からメジャーな言葉となり,以降波はあっても継続的に進展し,個別の課題解決や遠隔無人化施工の洗練化を経て,現在に至っている。この間,特に計測・情報・通信・制御技術の高精度・高速・低価格化が進んでいる。
このプロジェクトでは,代表的汎用建設機械の油圧ショベルについて,IT·RT技術を,現実的な範囲で最大限導入する,基盤技術に取り組んでいる。
製造業で進んだ生産技術は,士木施工に生かせないのか?例えばNCマシンやこれを生かす多品種少量設計・生産システムは?建設労災が多いのに施工現場にいる人は減らせないのか?これらの甚本的問いかけに対し,特に屋外作業は,空間情報の適切な活用が必要であり,要素技術がそろわず,これまで取組が進まなかったことにチャレンジしたい。
設計と施工形状のプロダクトモデル記述,位置と周囲計測を統合する「周囲環境認識」(コンテクスト・アウェアネス),施工結果情報の管理・再利用を現実化したい。人による丁張り設置・作業中計測を不要に,補助要員を滅らす施工形態としたい。オペレータに施工指示や参考情報を提供する「施工ナビ」(設計図と計測結果を建設機械に搭載し通信する)が,遠隔でも,車載でも,使えるようになるとよい。2台を一人で操作できるマシンと,その(自動機能を活用する)施工形態を提示したい。「プログラマプル・バックホウ」の技術仕様や組合せ施工モデルが,コンソーシアム内で,自由に改良されていくようになるとよい。
その他に施策的には,災害復旧の安全・確実・迅速化,品質確保に資する質の高い建設技能者の確保,海外労働者の大幅流入のリスク管理等があげられている。特に労働者数に対する労働災害死亡者数の比率で,建設業は他産業平均の4倍近く,建設機械関係だけでも他産業平均に近い状況にあり,投資額に対する比率では上昇傾向にある。この解釈や対応には種々あろうが,IT技術を生かし,技術からのアプローチが必要であると考えている。
おわりに,関係各位への謝意を表し,「建設生産工学」と「建設ロボット」の今後への期待を表したい。
