
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ遠隔操縦による施工の効率化検討について
国土交通省 九州地方整備局
九州技術事務所 機械課
機械調査係長
九州技術事務所 機械課
機械調査係長
久保田 孝 行
国土交通省 九州地方整備局
九州技術事務所 機械課長
九州技術事務所 機械課長
橋 本 克 也
1 はじめに
遠隔操縦機械による無人化施工は,平成2年11月に噴火した雲仙普賢岳の堆積土砂を緊急に除去する災害復旧工事として,試験フィールドで平成6年度に採用されて以来,改良・発展を遂げ,災害復旧現場等での導入実績も多くなってきている。しかし,有人施工と比較して施工効率や施工精度等が劣るといった遠隔操縦施工特有の課題が残されており,その向上が望まれている。
そこで,主に災害対策用に用いられている遠隔操縦機械の,一般工事への導入を目的として施工効率,施工精度の向上のための検討を行うもので,九州技術事務所で災害対策用として開発した簡易遠隔操縦装置(通称ロボQ「以下,ロボQという」)を用いて,平成13年度と平成14年度の2カ年にわたり検討を行った。
2 業務概要
(1)遠隔操縦機械の実態
現在の遠隔操縦建設機械の使用実態及び作業内容について次の各項目毎に整理した。
① 文献調査
② カタログ調査
③ URL調査(情報化施工,無人化施工)
④ 建設機械の自動化・ロボット化調査
無人化施工に使用されている遠隔操縦建設機械はバックホウをはじめブルドーザー,ダンプトラック等があり,作業内容は土木構造物等に対しての複雑な作業は少ない。それは,遠隔操縦機械による施工が作業効率,施工精度の向上よりも,作業員の安全性の確保や苦渋作業からの解放を目的としたものが多いことが分かった。
(2)導入のための基礎検討
遠隔操縦機械の一般土木工事へ導入するための問題点,改良点を抽出するために,バックホウにロボQを搭載して,様々な視覚情報パターンによる掘削,旋回,ダンプトラックヘの積込みの一連の作業による基礎的な試験を次のパターンにより行った。
① 目視近傍による掘削
オペレータが掘削作業ヤードと遠隔操縦機械に対して一番見やすく作業感覚をつかみやすい近傍からの遠隔操縦掘削作業
② 作業ヤードから20m離れての掘削
オペレータが作業ヤードから20m離れて,目視による遠隔操縦掘削作業。
③ ロボQ搭載カメラによる遠隔掘削
オペレータが操作室の中から,ロボQに搭載してあるカメラからの映像による遠隔操縦掘削作業。
④ ロボQ搭載カメラ+固定カメラ(1)による遠隔掘削
上記③と同様,オペレータが操作室の中からロボQに搭載したカメラ映像及びダンプヘの積込み状況が把握しやすい場所に設置した固定カメラからの映像による遠隔操縦掘削作業
⑤ ロボQ搭載カメラ+固定カメラ(2台)による遠隔掘削
上記④と同様,オペレータが操作室の中からロボQ搭載カメラ映像,作業状況を正面,側面のから映像を取得できるよう,上記①にもう1台固定カメラを配置し,3つの映像による遠隔操縦掘削作業
作業後のオペレータヘのヒヤリングの結果,①作業ヤードの全体的な空間の把提,②バックホウと掘削面またはバケットとダンプトラックとの相対的な位置把握(奥行き情報)についての情報を必要としている事が分かった。これは,視覚に関しての情報が施工効率及び精度に多大に影響することが分かった。
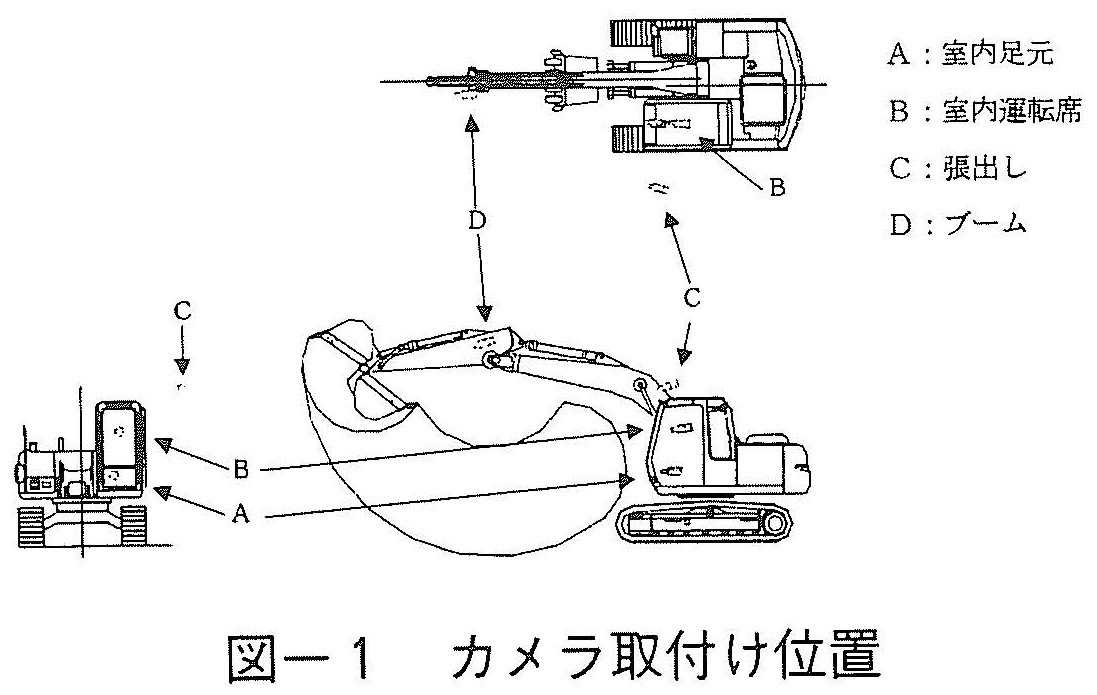
(3)視覚情報機器の機能評価試験
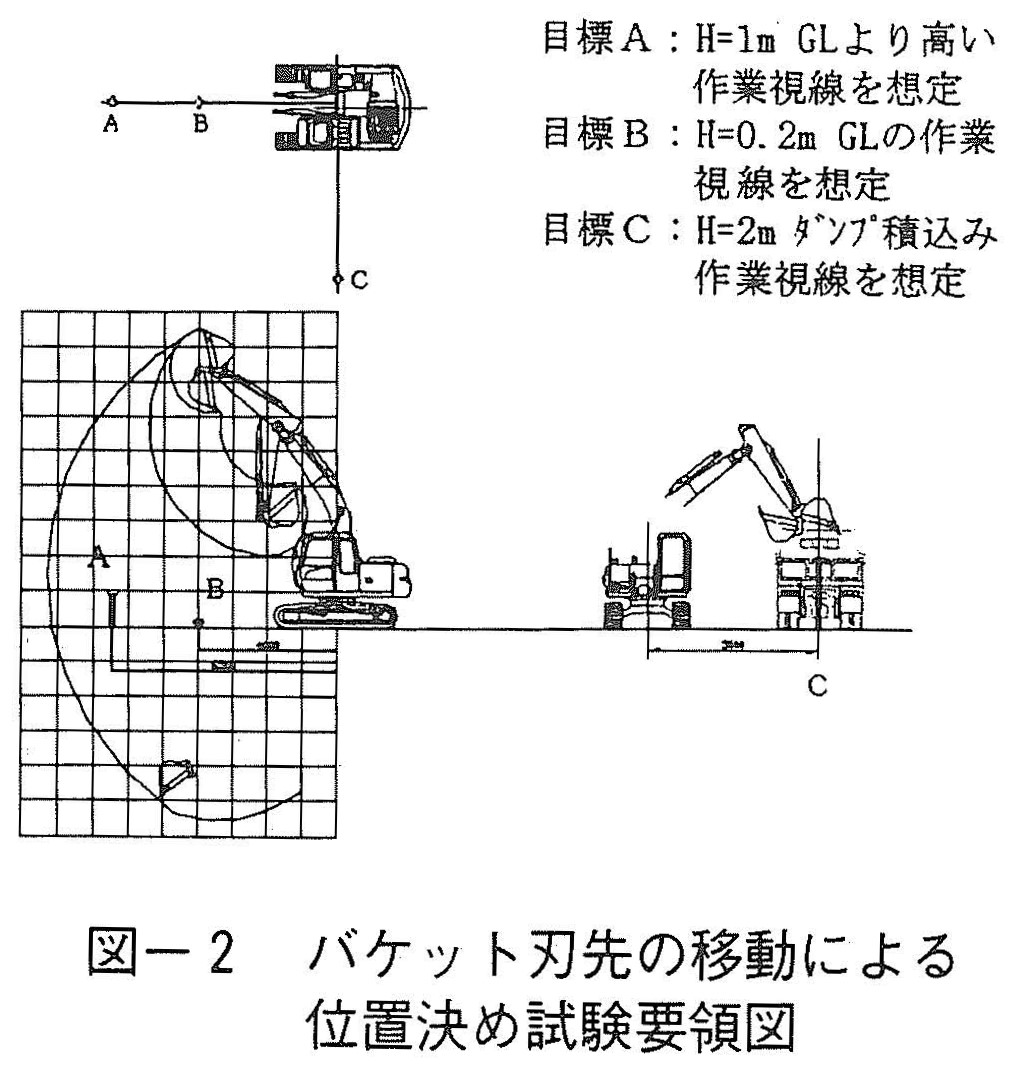
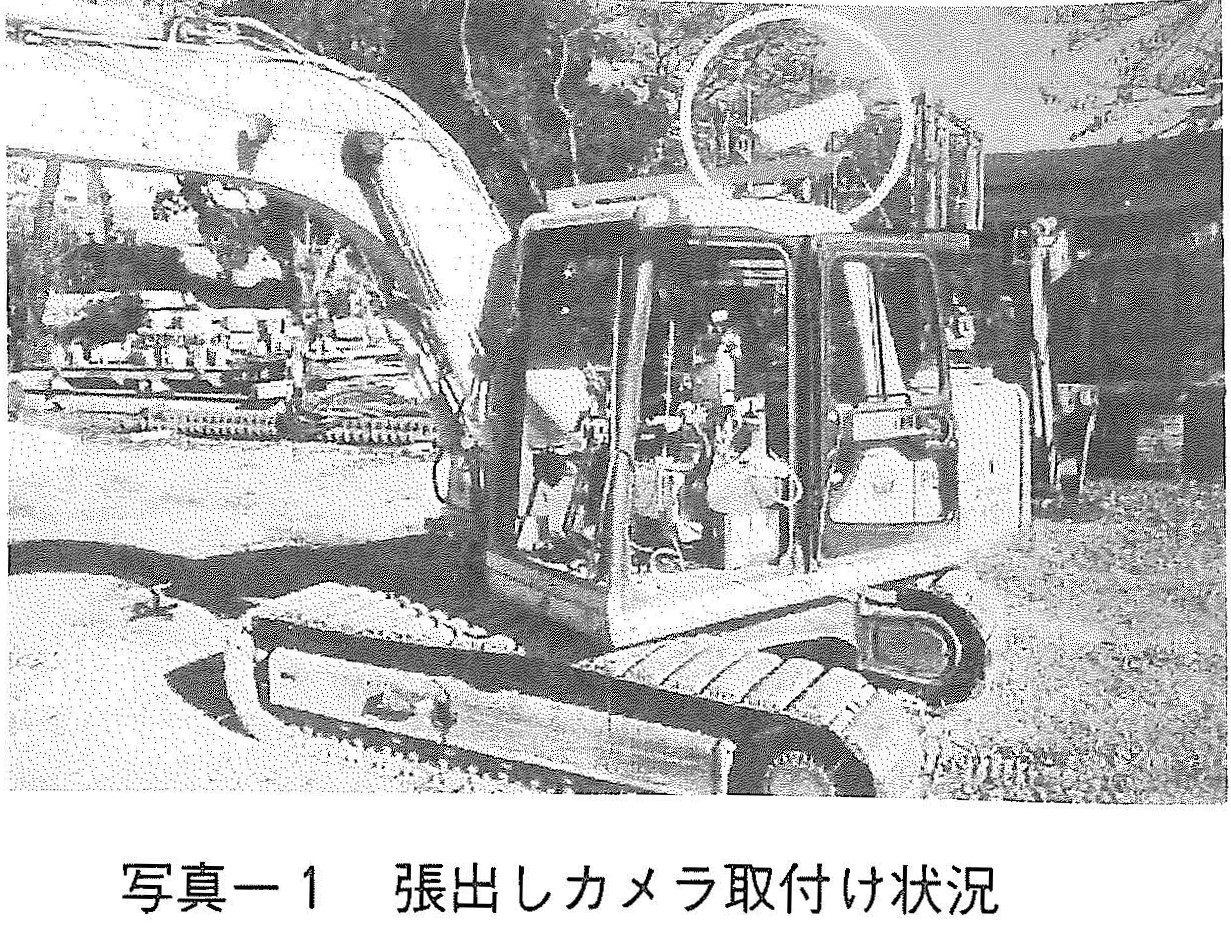
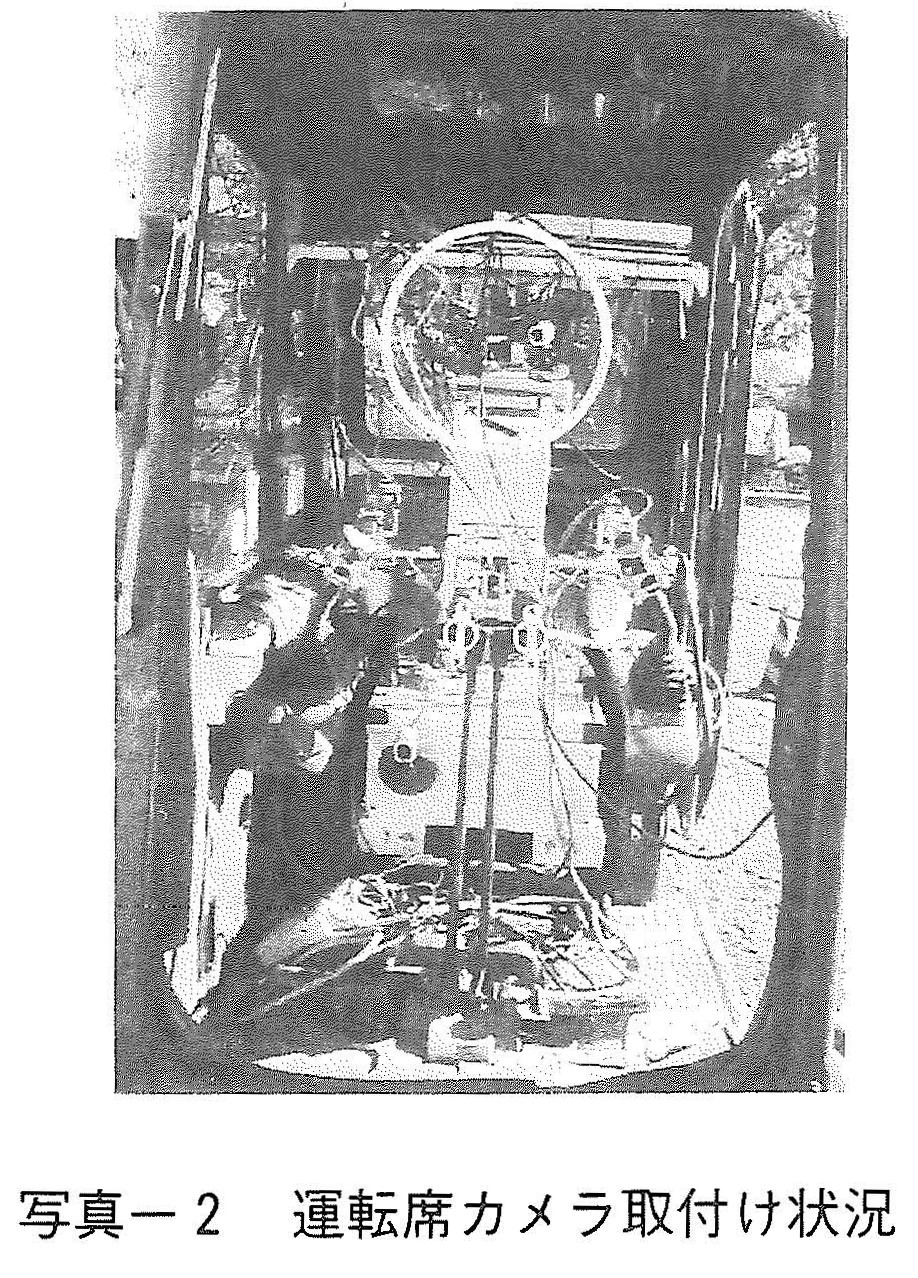
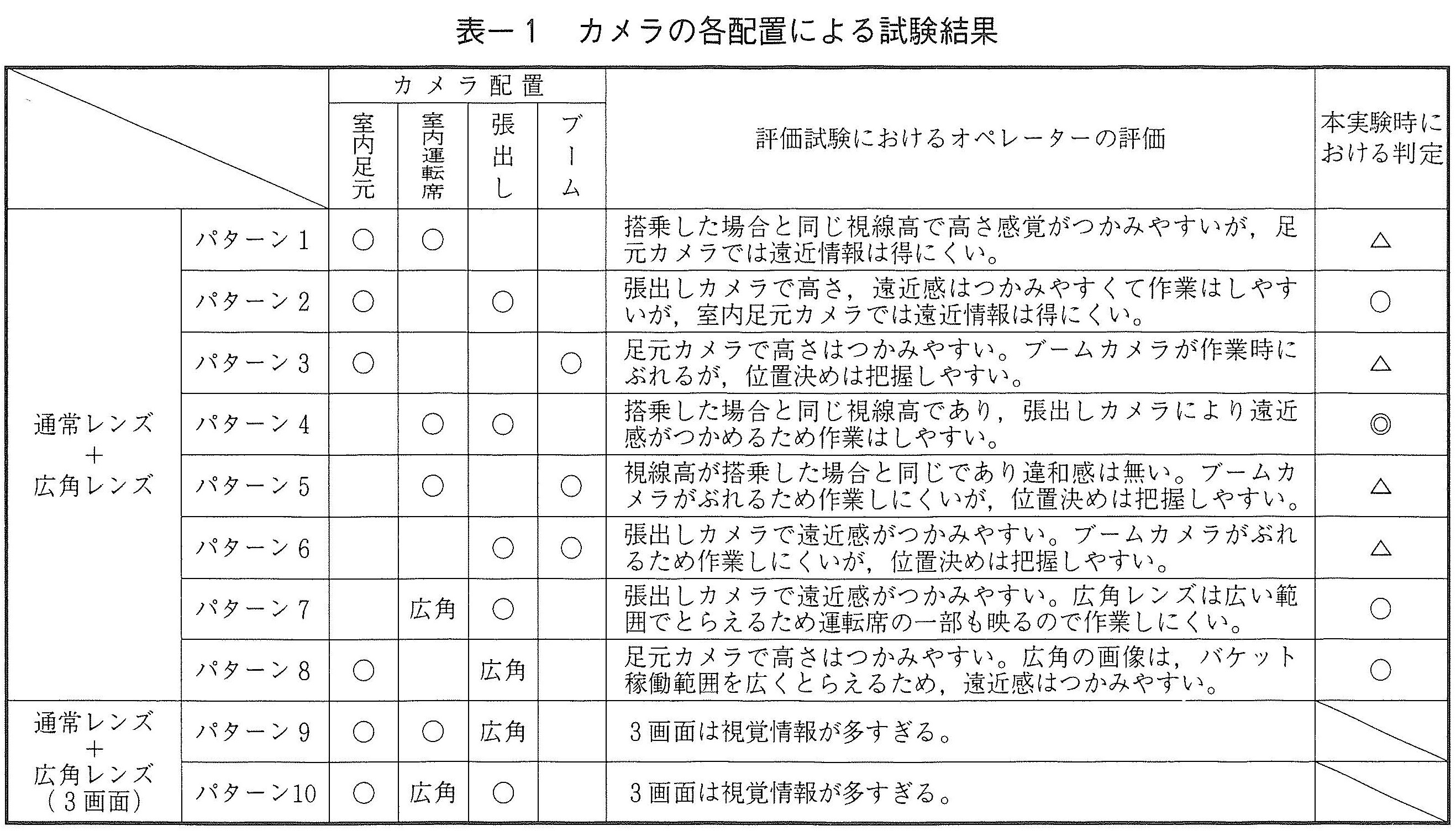
オペレータが必要とする視覚情報とは,作業ヤードの全体的な空間把握と対象物への奥行き情報であり,試験はカメラを運転室内足元,室内運転室,張出し,ブームにそれぞれのパターンで設置(図ー1,写真ー1,2参照)し,バケット刃先の位置決め(図ー2参照)作業について機能評価を行った。
① 位置決め作業試験結果
試験の結果,良好な成果が得られたのはパターン4(表ー1参照)であった。これは,室内運転席カメラが搭乗した場合と同じ感覚であったことと,張出しカメラが遠近感を認識しやすいカメラの配置であり,作業全体のイメージがつかみやすかったためである。
よって,このカメラ配置により実証試験を行う。なお,機能評価試験では張出しカメラのレンズを通常で行ったが,実証試験では広角レンズでも行い有効性を確認する。また,3Dレンズを含めた試験についてもパターン4と同じ配置とする。
(4)視覚情報機器での実証試験
実証試験は,視覚情報機器の機能評価試験結果に基づき実現場で掘削,法切,整形作業,原石投入作業の試験を行った。使用した機械及び試験要領については次のとおり。
1)使用機械
作業別に使用した機械は次に示すとおり。なお,掘削,法切,整形作業についての使用機械は平成13年度と同規格の機械を使用している。
① 掘削,法切,整形作業
バックホウ 0.5m3級(ロボQ搭載)
ダンプトラック 4T車(有人運転)
② 原石投入作業
バックホウ 2~3m3級(ロボQ搭載)
移動式クラッシャー(有人運転)
バックホウ 2~3m3級(有人運転)
ダンプトラック 10T車(有人運転)
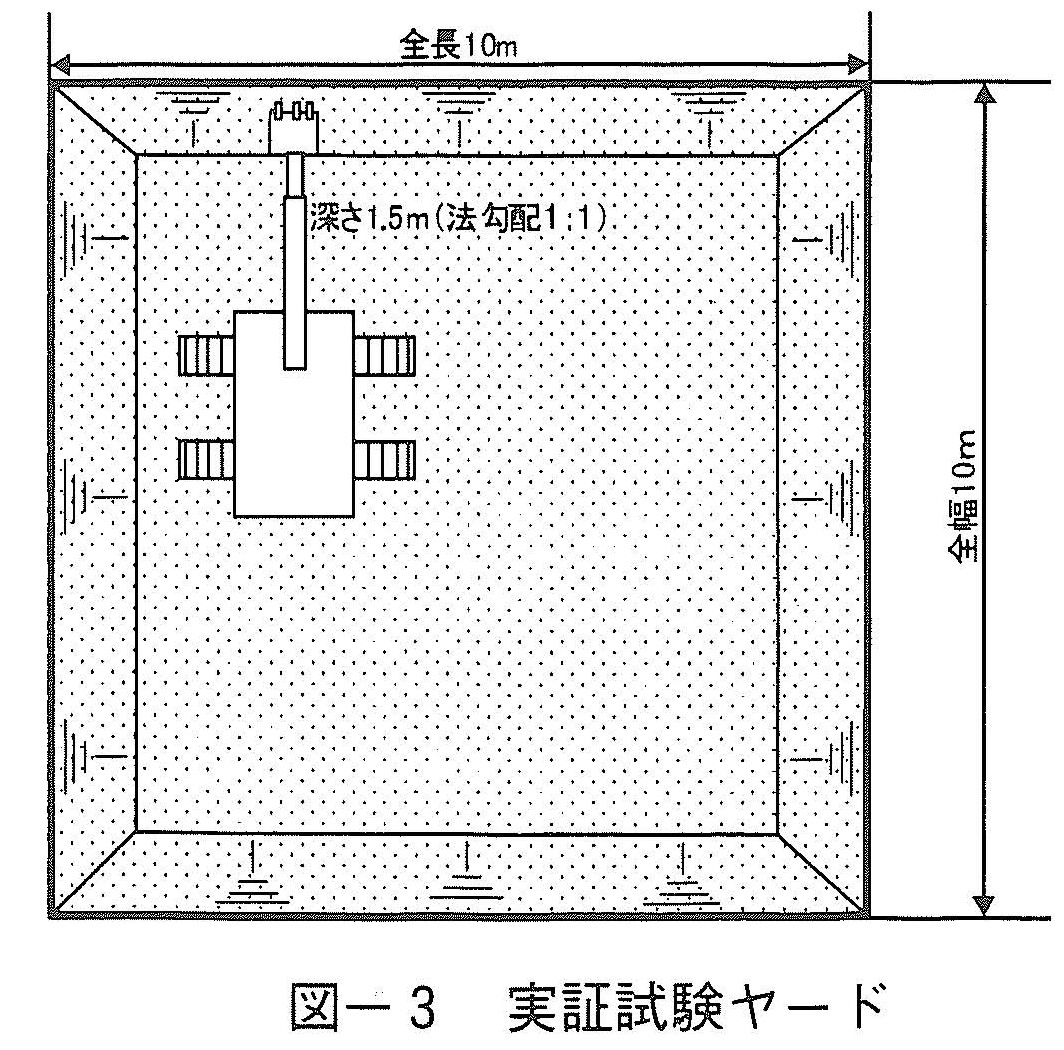
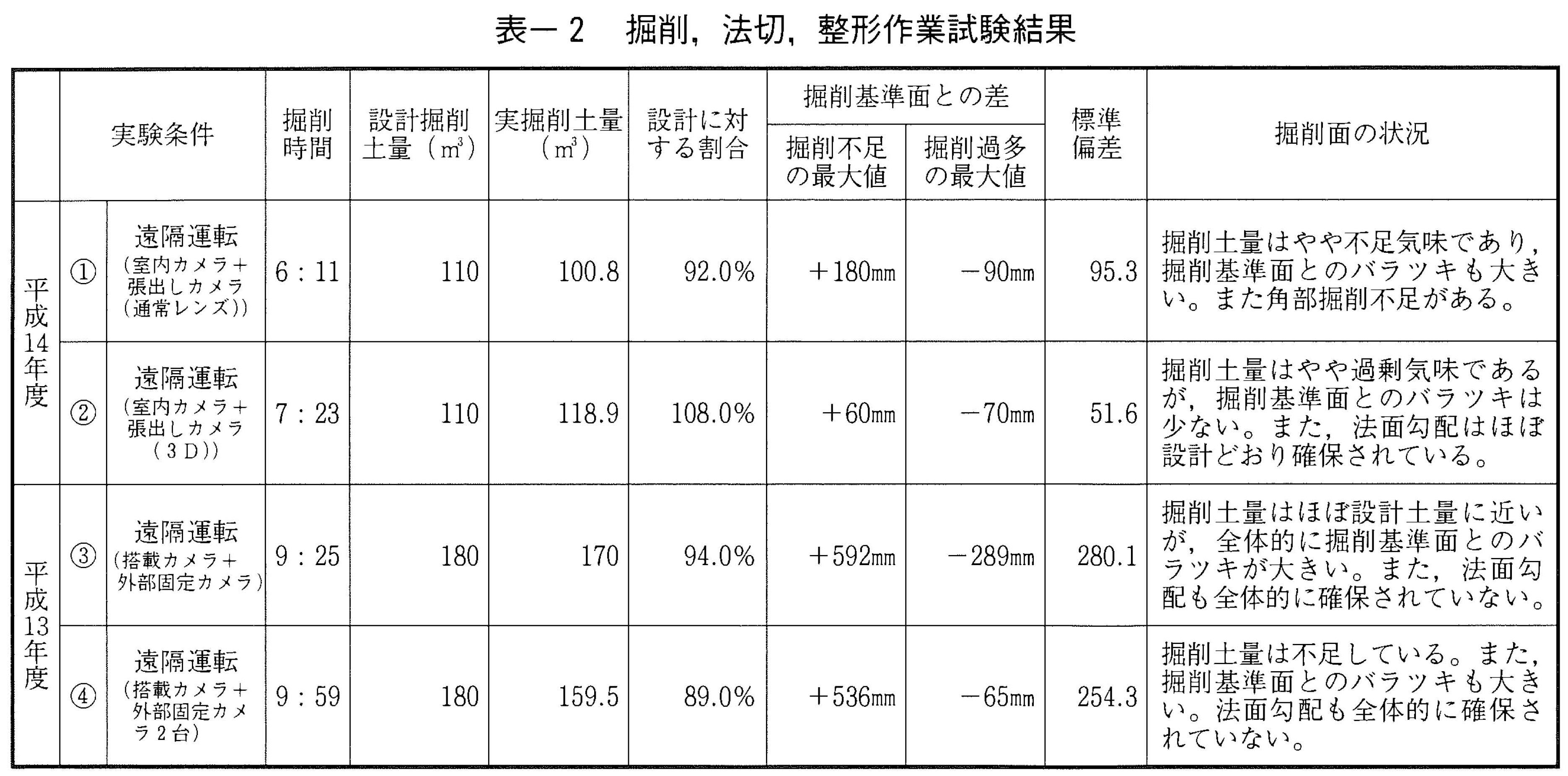
2)掘削,法切,整形作業試験
0.5m3級のバックホウを用いて,実証試験ヤードを図ー3のとおり設定し,掘削,法切,整形,の一連の作業における試験を行った。表ー2に①作業時間,②掘削土量等の項目についてまとめた。また,平成13年度の試験結果についても有効性について比較を行った。実証試験状況を写真ー3に示す。

3)試験結果
試験結果では,作業ヤードの全体イメージと遠近感が認識できたため,実際のダンプトラックへの積込み作業時においては,外部カメラ(カメラ車等)無しでの施工がほぼ可能となった。3Dレンズは法面整形,角部などの細かな施工には有効であることがわかった。また,掘削誤差については平成13年度と比較して大幅に向上した。
よって,2台のカメラの適切な配置とレンズにより,施工精度の向上及び画像システムの有効性が確認された。
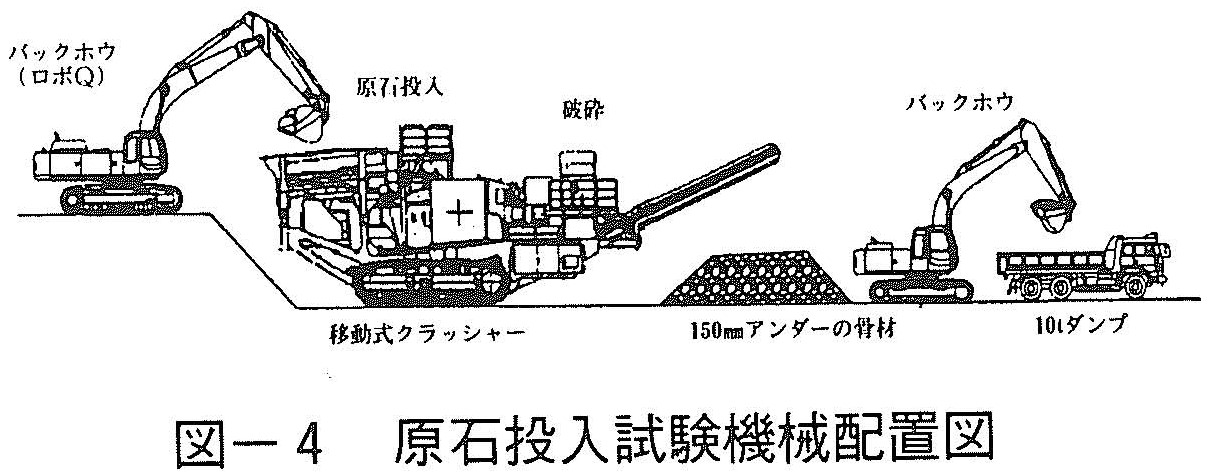
4)原石投入作業による試験及び結果
掘削作業による試験と同様のカメラ配置により,移動式クラッシャーヘの投入作業の試験を行った。試験状況を図ー4に示す。試験結果は,有人作業と比較して約80%の作業効率が得られ,掘削以外の作業でも有効性を確認できた。
3 委員会の導入
「ロボQ」を用いた遠隔操縦の施工性向上および効率化について審議・助言を戴くため,「遠隔操縦による施工の効率化検討委員会」を設置した。委員には,九州大学大学院の松永教授を委員長とし,土木研究所,原子方研究所,建設無人化施工協会などに所属する学識経験者10名を選出した。委員会は年2回実施し,①視覚情報機器の機能評価試験結果,②実証試験計画及び結果について検討して戴いた。
4 おわりに
主に緊急災害対策用に用いられている遠隔操縦機械の,一般工事への導入を目的としてロボQを搭載したバックホウに,有効な視覚情報機器に機能付加して施工精度の向上を確認した。
今後,これらの結果やデータをもとに一般土木工事に幅広く普及していくことが肝要であると考える。
