
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ水無川における最近の無人化施工
九州地方整備局 渡部文人
1 はじめに
平成2年の雲仙普賢岳の噴火に伴い、平成5年に国交省(当時建設省)雲仙復興事務所が新設された。当時の状況は大量に流出される土石流による人命・家屋・耕地・交通等の被害に対する防災工事が急務であった。
しかしながら工事は、火砕流・土石流が多発する危険区域での施工となるため、同年7月に創設された「試験フィールド制度」を適用し、無人化除石工事の技術提案を広く民間に求めた。公募に対し30余社の応募があった中から施工可能な6技術が選定され、平成5年度内に試験施工の実施を完了した。ここに初めて無人化による大規模工事を開始し、平成6年度以降からは無人化施工による除石工事が本格的に実施されることとなる。平成7年には水無1号砂防えん堤工事に着手し、無人化施工技術は更に進歩することになった。
無人化施工においては、効率の向上、操作の簡素化、施工の確実性、特に安全の確保のための止むを得ず行っていた危険区域での有人部分の無人化等に着工以来取組んできた。
当初、出来高検査・竣工検査等については有人作業に依存していたが、数年前からはGPSや自動追尾式光波測量を利用した遠隔測量方式への切替えを行ってきたところである。
更に最近になって、新しく取り入れられた無人化の施工方法も多いのでその開発の内容について記述する。
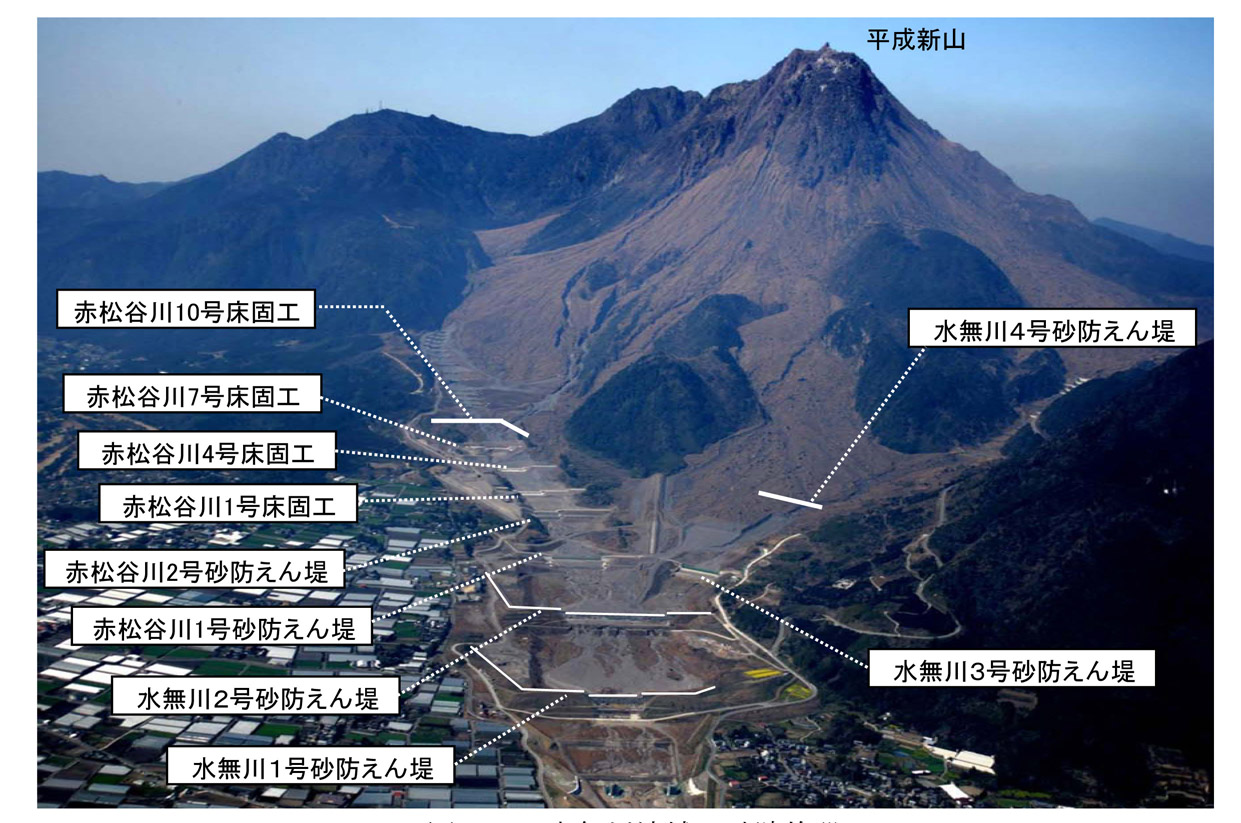
図-1 水無川流域の砂防施設
2 航空レーザー測量による着工前測量
2-1 従来の着工前測量
水無川流域の上流部では長年の風雨によるガリ侵食や転石が各所に点在するため、測量システムを搭載した小型の無人化重機では稼動範囲が大幅に制限される。このため、着工前測量のような現況地形測量を行う場合、無人化ブルドーザ等により事前整地を行い、小型無人化重機の稼動環境を整える必要があった。
2-2 航空レーザー測量の導入
赤松谷川10号床固工工事では、工事範囲が約18haと広大であるため、従来の測量方法では膨大な時間を必要とする。そこで、ヘリコプターに搭載したレーザースキャナーを利用して、地形形状をスキャニングする航空レーザー測量を実施し、その有効性について検証を行った。
2-3 航空レーザー測量の特徴
レーザースキャナを利用した計測方法は、地上の固定点から計測する方法と上空の移動体から計測する方法に大別される。後者の特徴として、地形形状の影響が非常に少なく、広大な範囲を短時間で計測できる利点がある。その反面、航空法によって飛行高度等に制限があり、移動体の位置計測にGPSを用いるため、前者と比較すると計測精度が低い。そこで、精度検証用のモデルを有人エリアの2箇所に設け、無人エリアと同時に計測を行った。事前に有人で測量した結果とレーザー測量の結果を比較して計測精度の検証を行った。
2-4 計測誤差と取得データの運用方法
図-2の上段は精度検証に用いたモデル(約1.8m角)であり、下段はレーザー計測によって得られた点群の分布図を示している。レーザー計測によって得られたデータは3次元座標値を有する点群であり、図中の赤、青、黄色がそれぞれX面、Y面、Z面に対応する。黒線で描かれた面は有人の測量結果を示したもので、それぞれの点群の座標値と比較すると±50㎜以内の誤差に収まることが確認できた。点群の間隔は30㎝以内で取得するように設定し、合計で210万点の座標データが得られた。図-3が計測範囲全体の地形データである。白線は縦断横断ラインを示しており、断面情報を容易に抽出することができる。縦横断ラインの選択が自由にできるため、複数の線形に沿った任意の縦横断図を描くことが可能である。今回の工事では航空レーザー測量によって得られた3次元データから工事線形毎の縦・横断図を抽出し、工事土量の算定に利用した。土量算定方法は従来の平均断面法を採用した。
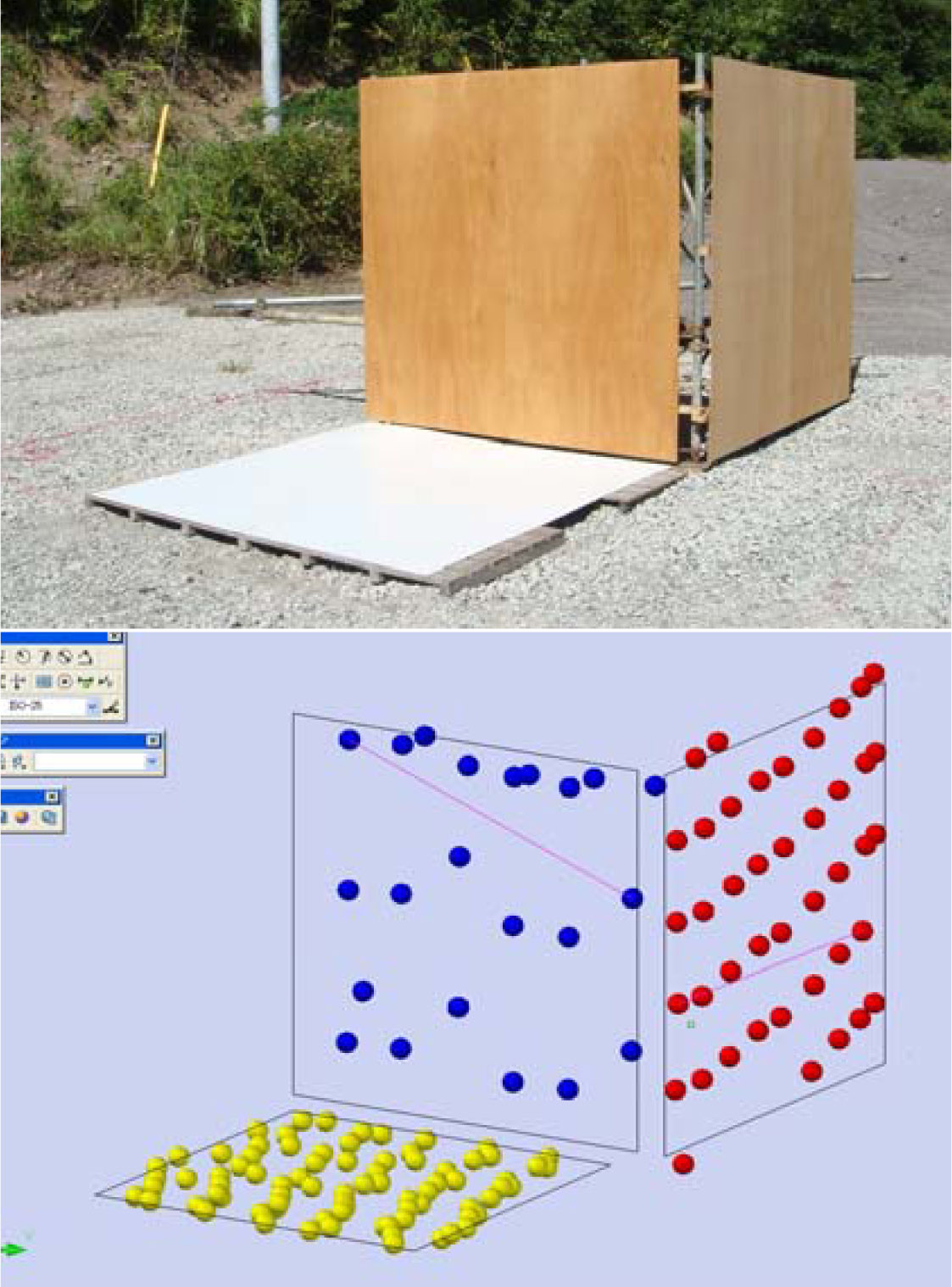
図-2 精度検証モデルと解析データ
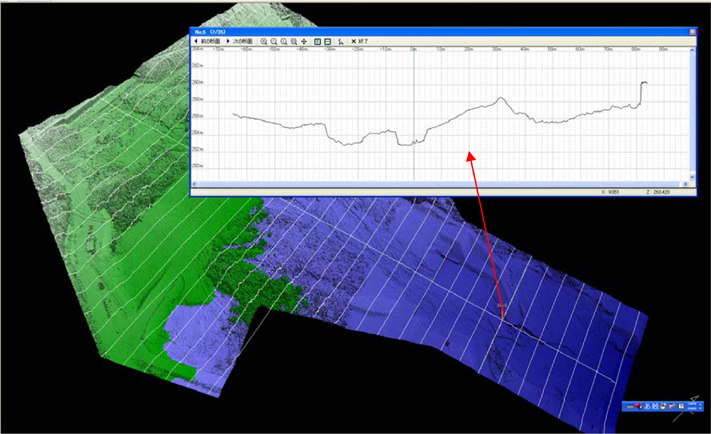
図-3 全体地形データと横断図の抽出

図-4 ヘリコプターによる航空レーザー測量(白線はレーザーのイメージ図)
2-5 航空レーザー測量の有効性
航空レーザー測量は地形形状による制限を受けにくく、広大な範囲を短時間で計測することが可能である。作業の安全性と緊急性を考慮すれば、計測誤差±50㎜は許容範囲内と評価できる。突発的に発生する緊急土砂災害に対し、有効な計測手段の一つであり、今後の更なる技術開発と導入可能な仕組みづくりに取組みたいと考える。
3 平板載荷試験
床固基礎の平板載荷試験は従来有人で実施してきた。その後、簡易支持力計(キャスポル)を利用した遠隔計測手法が開発されてきたが、計測の確実性とデータの再現性について課題点を残していた。そこで、赤松谷川7号および10号床固工工事において、通常の平板載荷試験と同様の手法で遠隔操作可能な試験装置を開発し、良好な結果を得ることができた。
3-1 平板載荷試験装置の概要
平板載荷試験装置は無人化バックホウのカウンタウェイト部に取付ける(図-5参照)。この試験装置は図-6に示すとおり、油圧ジャッキと荷重計測用の圧力計および沈下量を計測するための変位計等から構成される。

図-5 試験装置の取付け状況
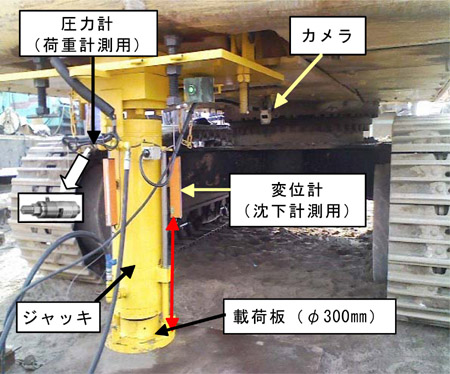
図-6 平板載荷試験装置のジャッキ部分
3-2 システム構成と試験方法
平板載荷試験装置は①油圧ジャッキの遠隔操作部と②計測通信システム部および③カメラ映像システム部から構成される。図-7に測定時の操作室状況を示す。
図-8は計測データのモニタリング状況である。青いラインは時間経過に対する沈下量の変化状況を示し、赤いラインがジャッキに加えている荷重の状況を示している。
ジャッキの加圧状況を監視しながら加える荷重を遠隔で微調整し、荷重データと変位データの変遷は設定した時間間隔で保存される。有人による試験方法と同様に、必要な荷重を静的に与えることが可能となり、有人計測と遜色の無い計測結果が得られるようになった。
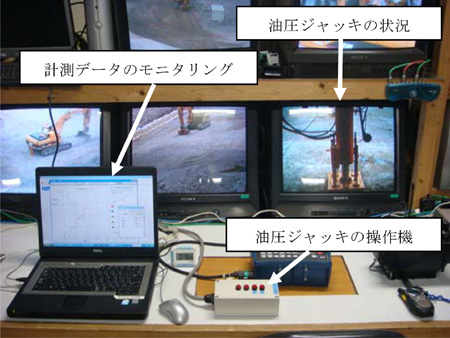
図-7 測定時の操作室状況
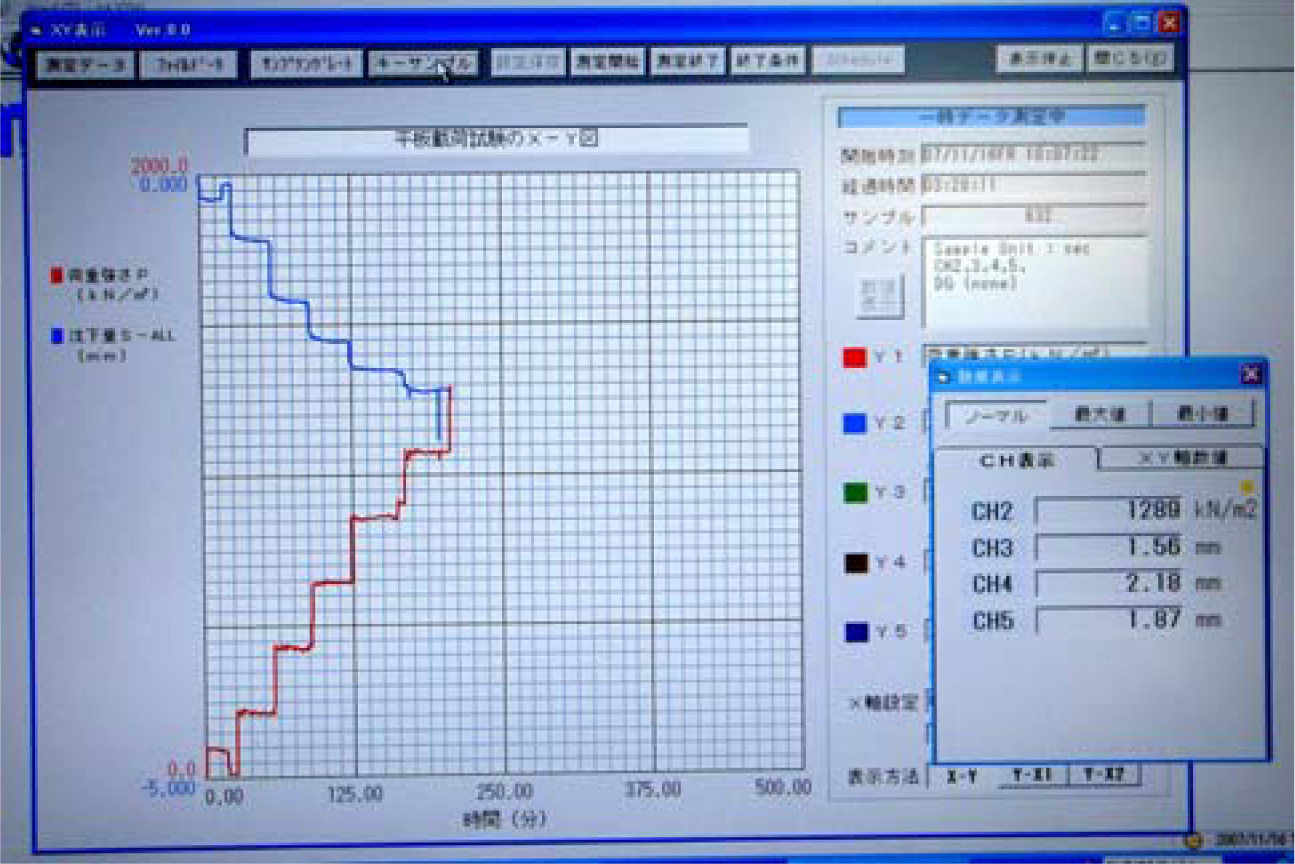
図-8 計測値のモニタリング
4 土砂型枠施工の合理化
土砂型枠施工は、無人測量システムを用いて直径10㎝のマーキングを施工面に多数施し、スミ出しラインに見立ててそのマークを基準にテレビ画面上に施工線を描いて施工を行っていた。しかし、この方法ではマーキング及び施工線表示に時間を要していた。今回は新しい発想として、8mの専用ブレードにGPSを搭載した土砂型枠整形用のアタッチメントを開発した。
4-1 土砂型枠整形ブレードの概要
専用の土砂型枠整形装置によって土砂型枠整形作業の効率化と精度向上を図る。ラジコンバックホウをベースマシンとして、専用のブーム・アームと8m長尺ブレードをアタッチメントとして装備する(図-9参照)。ブレード部にはGPSアンテナ2基と傾斜計を装備し、リアルタイムで設置位置への誘導が可能である。
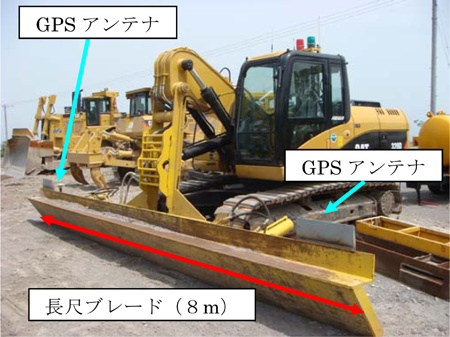
図-9 土砂型枠整形用ブレード
4-2 土砂型枠整形用ブレードの施工方法
土砂型枠整形用ブレードに搭載した2つのGPSを使って、ブレードの位置と向きをリアルタイムに把握することが出来る。図-10にブレード誘導画面を示す。中央の赤い線が誘導目標線であり、黄色い四角がブレードの現在位置を示している。目標の赤い線に対して、黄色い四角が平行に重なるようにブレードを誘導していく。画面右側の上と下の矢印はブレードを誘導すべき方向を示し、中央の矢印はブレードに取り付けた傾斜計の傾き角を示している。
ブレードを所定の位置にセットし、もう一方のバックホウで土砂の撒き出しを行う。図-11に型枠整形用ブレードを利用した施工状況を示す。
従来の工法と比較して、使用する重機が増える。狭いエリアでは利用できない課題があるが、事前の測量工程を短縮することで、時間あたりの施工延長が3%程度向上し、出来形のバラつきが少なく確実な施工が可能である。
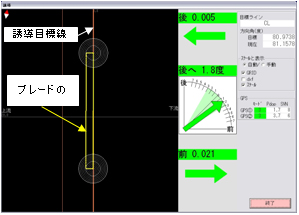
図-10 ブレード誘導画面

図-11 土砂型枠整形用ブレードを用いた施工状況

図-12 ブレードを使用して整形した土砂型枠
5 景観対策としての緑化工事
赤松谷川7号床固工工事に引き続き10号床固工工事において、法面の緑化と植樹を遠隔操作で実施し、景観対策にも取組んでいる。
5-1 種子吹き付けによる法面の緑化
事前に行った配合・発芽試験を元に現地発生土を篩い分けて、種子および肥料を混合して吹付材を製造する。吹付材の製造は有人区域内で行う。
吹付作業は、無人化重ダンプで吹付材を運搬し、吹付アタッチメントを装着した無人化バックホウで材料を均等に散布する(図-13参照)。吹付アタッチメントは上部がホッパー構造になっているため、直接重ダンプから材料を採取できる。

図-13 吹付状況
吹付厚さの出来形管理はレーザースキャナ計測で面管理し、吹付厚不足とならにように管理を行った。あらかじめ吹付前の法面形状を計測し、吹付後に再度法面形状を計測すると吹付材の厚さを把握できる。地上に固定したレーザースキャナを使って面管理を行うことにより、任意の断面について評価することが可能になる。従来の遠隔測量方法では、法肩・法尻を計測できても、法の中間部分の評価が困難であった。さらに厚さの均質性を評価するには、膨大な測量時間を必要とする。今後の出来形管理手法を合理化する手段として試験的にレーザースキャナ計測を導入した。
図-14に吹付厚さの管理断面図を示す。緑色の部分が吹付材の厚さを表している。
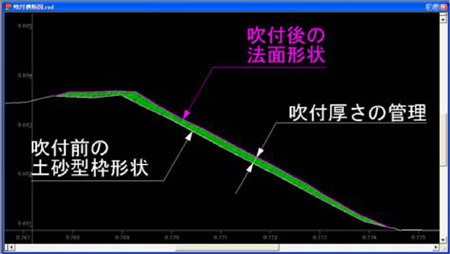
図-14 吹付厚の管理断面図
5-2 苗木植栽工の遠隔施工
苗木を無人化重ダンプで運搬し、専用の把持装置を装着したラジコンバックホウを使って植え込みを行った(図-15参照)。

図-15 苗木の植込作業
6 電波環境による施工範囲について
近年の無人化施工は、バックホウやブルドーザ、ダンプトラックなどの施工重機に加えて、無人清掃車、無人散水車、土砂型枠整形機、無人測量機、移動カメラ車などの施工支援重機によってより高度な施工が可能となった。その反面、利用している無線については、旧来からの特定小電力無線に依存しているため、同一の工区で同時に利用できるチャンネル数は既に飽和状態にある。
今回、水無川上流部の地形形状を考慮し、電波通信による施工範囲の調査を実施した。
6-1 電波の特性について
重機操作信号の通信には、429MHz帯の特定小電力を用いている。この無線の特徴として、
|
免許
通信距離
チャンネル数
混信防止機能
|
不要
150m(カタログスペック)
40波 (12.5KHz毎)
キャリアセンス機能
IDチェック機能
|
などが挙げられる。実際の運用については、同一工区内で同時に利用できるチャンネル数は40波のうち半分の20波までである。これは隣接チャンネル同士が互いに干渉してしまうことに起因する。図-16に電波の波形概念図を示す。図中の3つの波形は、ある連続したチャンネルに割り当てられた3つ電波を示している。1つの山がチャンネル1つに相当しており、山の頂点と頂点の間隔が12.5KHz毎に規則正しく割り当てられている。一方、山の裾野部分に注目すると隣接したチャンネル同士は図中のピンク色の部分で互いに干渉しあうため、混信する可能性が高い。このような周波数競合による通信不具合を回避するために、キャリアセンス機能という安全対策がなされている。
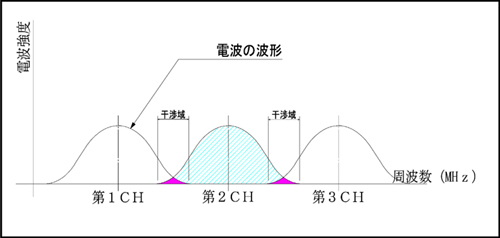
図-16 電波の強度と周波数の関係
キャリアセンス機能とは、無線送信機が電波を発信する前に、送信機自らが周りの電波環境をチェックし、周波数の競合が無い場合にのみ電波を発射する機能である。つまり、第2チャンネルを使用して既に電波を送信していた場合、別の送信機によって第2チャンネルの電波を送信出来ないことは当然であるが、第1、第3チャンネルの電波についても送信することは不可能となる。
6-2 キャリアセンス機能の影響範囲
これまでの実績では、1つの工区で同時に稼動する重機が少なかったため、通信可能距離のみが議論されてきた。しかし、施工支援重機の増加や情報化施工のための通信が新たに増加する傾向にあり、施工エリアの勾配がきつくなるなかで、キャリアセンス機能の影響範囲は無視できなくなっている。そこで、今回の調査によって得られた結果を図-17に示す。
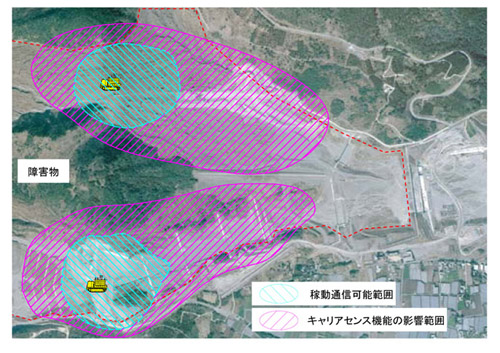
図-17 電波の影響範囲
送受信が正常に機能する通信可能範囲は200m程度であった。これに対しキャリアセンス機能が働く範囲は1㎞近く影響することが判った。電波は一般に高い所から低い方向に伝達しやすい傾向にあり、上流部で発信した電波が下流域に向かって到達し易いことが判る。山などの障害物によって通信が阻害され、キャリアセンス機能の働きも制限されることから、図中の青いエリアでは隣接工区からの電波干渉の影響は少ないと予想されるが、障害物の少ない下流域ではキャリアセンス機能によって送信不可能となる可能性が高い。
7 今後の課題
・無人化施工は工事の当初から比較すると計測技術の進歩により高度な施工が可能となっている。しかし、更に多量の電波通信が必要とされる場合は、混信及びリアルタイムの正確な通信のための機種の選定・組み合わせ・送信方法等について、検討を要する。
・無人化施工に必要なラジコン仕様の重機は保管されている機種以外は、工事着工後その都度改造して使用している。最近は重機のリニューアルが頻繁になっておりラジコン仕様の重機の調達が次第に難しくなる傾向にある。
・今回の航空レーザー測量において、補足的に行った山頂ドーム・ガリ浸蝕・土石流等の状況把握においても有効であった。今後の定期的及び緊急時の計測に利用が可能であると考えられる。なお、巨石の容積計測については地上固定点からのレーザースキャナによる計測を検討する必要がある。
・現在、警戒区域内で床固コンクリートの強度試験のためコア採取のためのボーリングを有人で実施している。上流域での施工においては危険 な作業であり、今後は有人区域内で試験施工としてコンクリート打設し、コア採取ボーリングを行い、その結果により本体施工を行う方式等も考えられる。
8 おわりに
わが国では、火山の噴火・地震・豪雨等による災害が数多く発生している。
その度に、土石流・地滑り・崩落・都市災害・堰止めダムその他による重大な災害を惹起しその対策においては常に危険箇所における、応急工事を必要としている。
雲仙の無人化施工において開発された無人化施工技術は、各地のそれらの災害箇所においても応急対策工事において活用されているところである。
自然災害以外にも、騒音・振動・悪臭或いは危険箇所での作業等オペレーターにとって、過酷な現場では無人化による施工が望まれる場合も多いと考えられる。無人化施工技術が今後多方面で利用されればいいのではないかと思われる。
無人化施工技術の更なる進歩した技術の開発には創意工夫が必要であり、前年島原で開催された国際都市火山学会において、無人化施工現場を視察した多数の国内外の関係者から、その努力に対して驚きの言葉があった。
かつて、ロシアからチェリノブイリ原子力発電所の事故の際、またアメリカからはイラクにおける地下不発爆弾の処理について、更に中国四川省における地震対策等についても、問合せがあり、実現には至らなかったが世界から雲仙に始まった無人化施工は注目されているところである。
このように、現在まで進歩してきた無人化施工技術は貴重な技術であり、今後は総合評価方式を活用し、更に進んだ技術開発を評価し無人化施工の技術の発展を図りたいところである。
※㈱フジタ(須郷氏)より資料の提供
