新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ公共工事における無人化施工の導入状況について
国土交通省 雲仙復興事務所
砂防課 課長
砂防課 課長
永 江 純一郎
株式会社フジタ 九州支店
主席コンサルタント(無人化施工)
主席コンサルタント(無人化施工)
須 郷 茂 夫
1 はじめに
平成2年11月に雲仙・普賢岳の噴火活動が198年ぶりに開始し,頻発する火砕流・土石流により,44名もの尊い人命が奪われたほか,家屋・田畑・山林·公共施設などに壊滅的な被害を与えた。この災害復興のため開所された雲仙復興事務所では,工事従事者の安全を確保するため,平成6年度より遠隔操作による無人化施工で砂防工事を実施している。除石工事から始まった無人化施工は,その後GPSによる施工管理システムを初めとして多くの技術開発が行われ,RCC工法による砂防堰堤の建設までその適用範囲を広げてきた。
この無人化施工技術により現在では水無川1号・2号砂防堰堤が完成し,約170万m3の土砂を捕捉する遊砂地が整備されている。しかしながら水無川上流部には,未だ1億7千万m3もの火山堆積物が不安定な状態で存在し,土石流による下流域への影響を軽減するためには,上流域において,さらなる砂防施設の整備が必要であった。
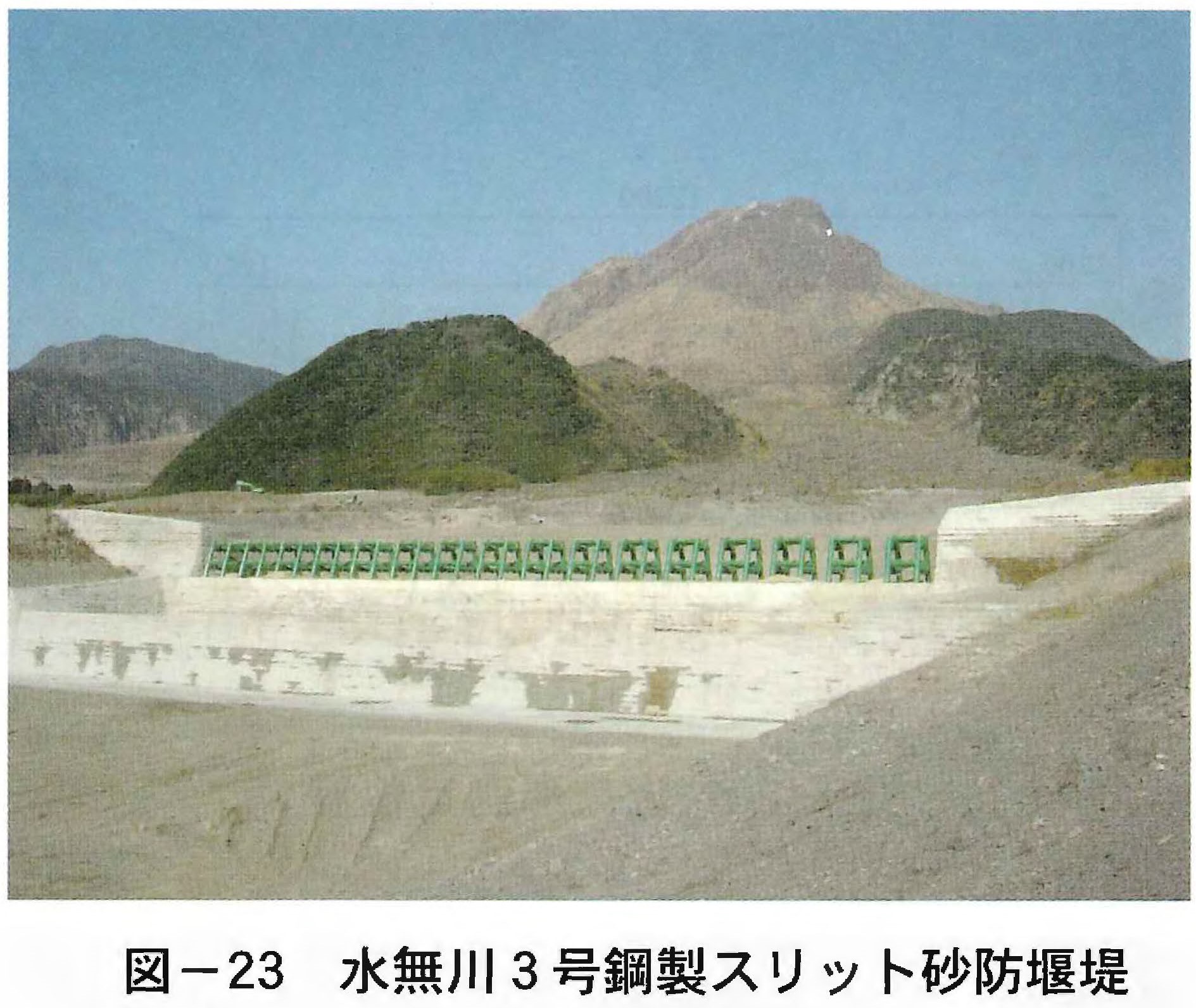
水無川3号鋼製スリット砂防堰堤は,上流域において効果的に土砂の捕捉容量を確保する「部分透過型砂防堰堤」として計画した。ここでは,世界で初めて実施した,鋼製スリット砂防堰堤の無人化施工について,施工方法ならびに新規に導入した無人化施工機械について報告する。

2 鋼製スリット砂防堰堤工事の概要
鋼製スリット砂防堰堤は,堤体の一部を格子状(スリット)にすることにより,小規模な土砂の流下を妨げることなく,常に大規模な土石流の発生に備え,堰堤上流側に土砂の捕捉容量を確保できる砂防施設である。図ー2および図ー3に堰堤平面図,標準断面図を示す。

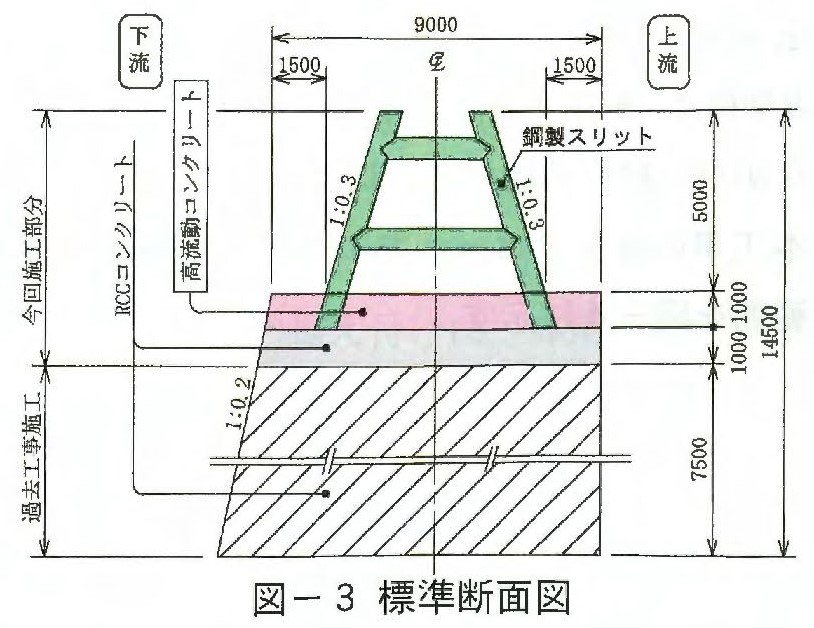
水無川3号鋼製スリット砂防堰堤は,堤長L=232.4m,堤高H=14.5mを有し,越流部の100m区間において,高流動コンクリートで根固めを行う16基のB型鋼製スリットを設置する。なお,図中に示すRCCコンクリートは,過去工事にてその施工方法を確立してきたRCC工法(Roller Compacted Concrete)および「GPS(Global Positioning System)施工管理システム」により施工した。
3 鋼製スリット砂防堰堤の標準工法
世界初の試みとなる無人化施工による鋼製スリット砂防堰堤の建設では,入札契約方式に「施工方法提案型」を採用し,応募のあった各社の提案方法を基に,以下に示す標準工法を定めた。
【標準工法】
(1)鋼製スリットの運搬・据え付け
・鋼製スリットの運搬は,重ダンプトラックにより安全に運搬する。
・鋼製スリットの据え付けは,バックホウ(把持装置付き)により所定の精度で安全に設置する。
(2)コンクリートの運搬打設
・コンクリートは,下層部RCCコンクリート,上層部有スランプコンクリートとする。
・有スランプコンクリートの運搬は,品質確保からアジテータ機能付きトラックとする。
・有スランプコンクリートの打設は,平坦性等からポンプ車による。
(3)型 枠
・上下流の型枠は土砂型枠とする。
・妻型枠は,転用または,埋設できるものとし,バックホウ(把持装置付き)により設置する。
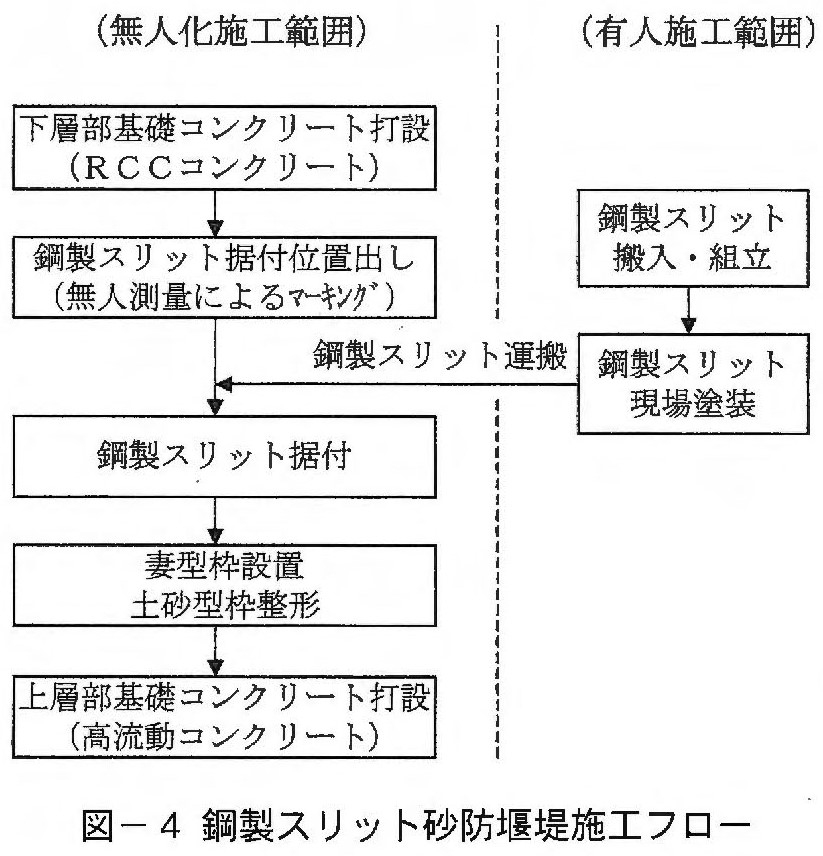
本工事の施工フロー,および無人化施工の適用範囲を図ー4に示す。
4 鋼製スリット砂防堰堤の施工
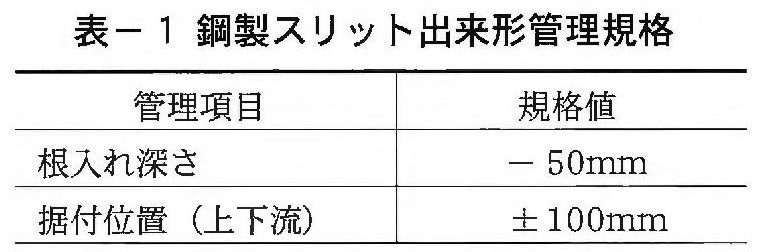
無人化施工による鋼製スリット砂防堰堤の建設に当り,出来形管理に関する要求規格を,既存の管理規格値に基づき表ー1のとおり設定した。過去に前例のない施工方法を採用する本工事では,事前に行った試験施工の結果を考察し,管理規格値の妥当性,および以下に記述する詳細な施工方法を決定した。
(1)鋼製スリットの位置出し
鋼製スリットの位箇出し,および据え付け位置の基準高計測は,無人測量システムにより実施した。本システムは自動追尾型光波測距器を用い,リアルタイムに位置を計測しながら,マーキング機構を搭載した重機を遠隔操作することで,所定のマーキング位置へ誘導することが可能なシステムである。図ー5にシステム概要を示す。
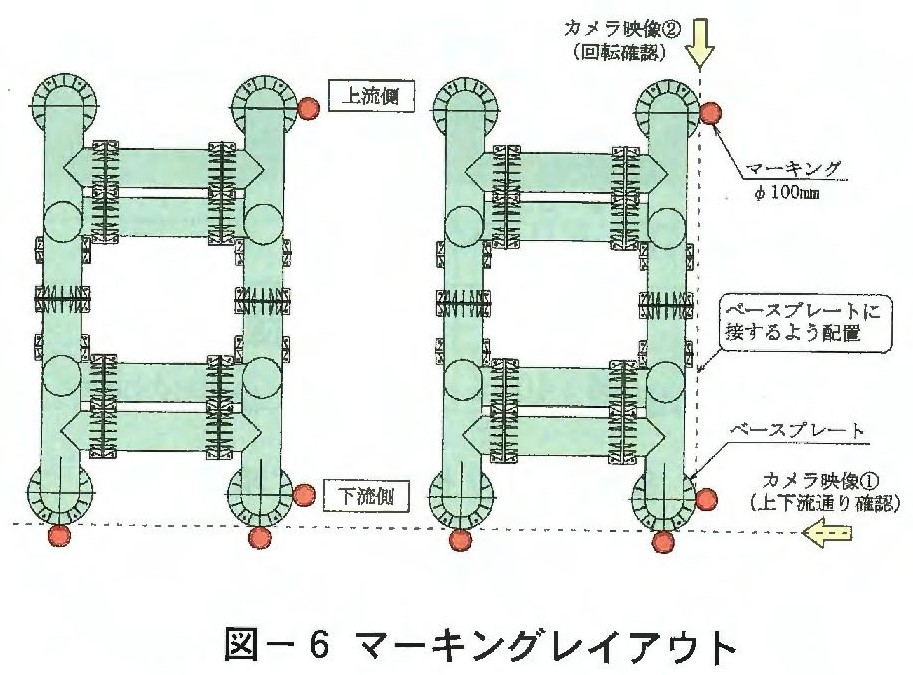
位置決めのマーキングは,鋼製スリット1基に対してL形に4箇所のマーキングを行った。マークの大きさはカメラでの視性認を考慮して直径10 cmの円形とし,脚部のベースプレートに接するように配置した。図ー6および図ー7にマーキングレイアウト,無人測量施工状況を示す。

(2)鋼製スリットの運搬
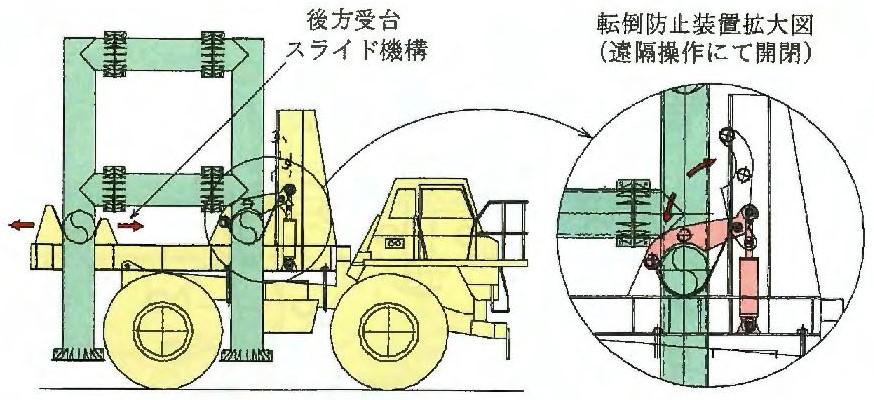
鋼製スリットの運搬は,45t重ダンプのベッセルを取り外し,専用の運搬架台を取り付けた運搬台車を用いて行った。図ー8および図ー9に運搬台車概略図,運搬状況を示す。
運搬架台には,走行中に鋼製スリットが転落しないよう,遠隔操作で開閉可能な転倒防止装置を取り付けた。また,バックホウにて鋼製スリットを把持し,吊り上げる際に塗装面を傷つけないよう,後方の受台にスライド機構を設け,地切り作業をスムーズに行えるようにした。

(3)鋼製スリットの据え付け
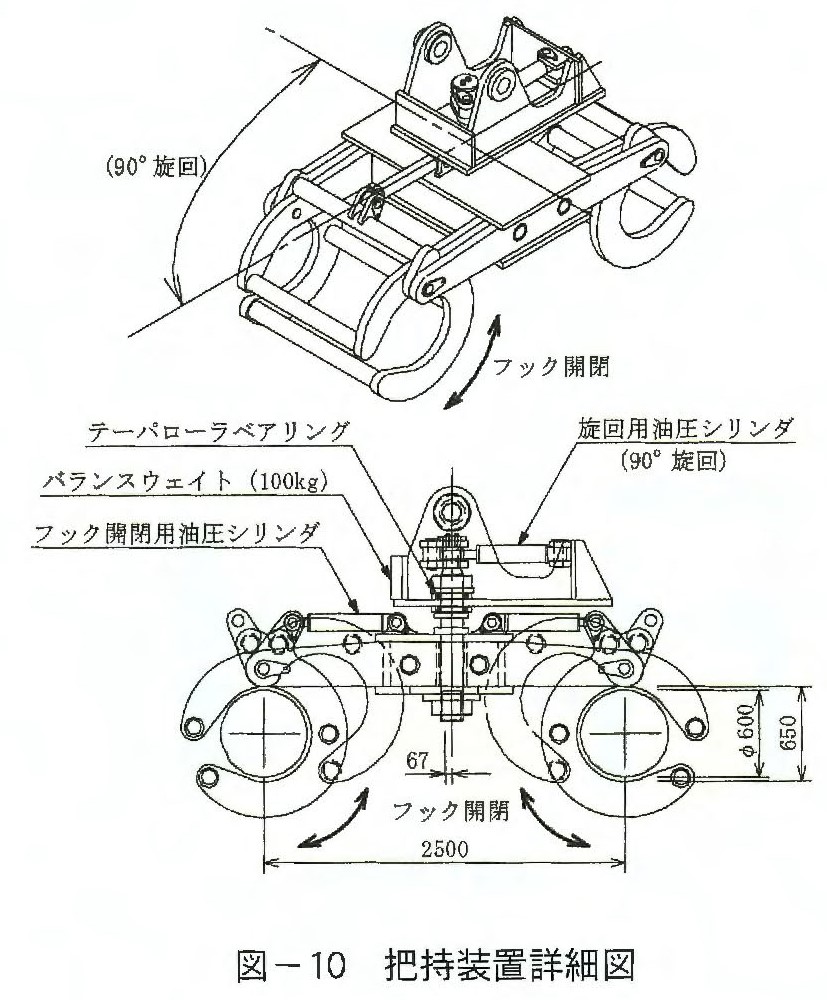
鋼製スリットの据え付けは,専用の把持装置を取り付けた4.0m3級バックホウ(自重75t)を用いて行った。把持装置の回転機構は,バックラッシュや微調整の容易さを考慮して油圧シリンダ方式を採用し,0~90゜の範囲で回転する。
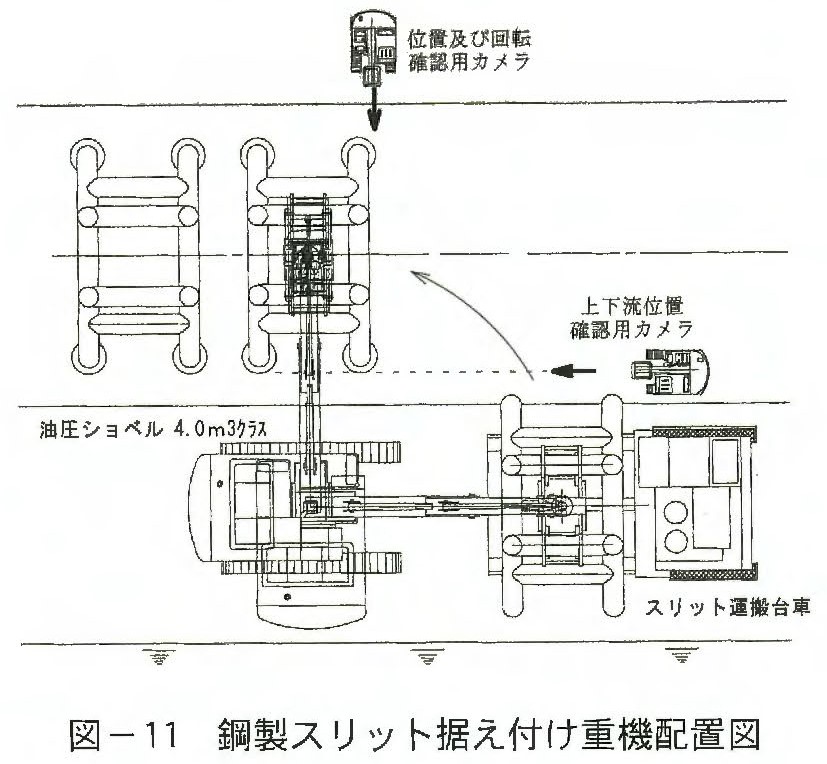
鋼製スリットの据え付け作業は,図ー11に示すとおり,重機およびカメラ車を配置して行った。無人測量によるマーキングとスリット脚部のずれをモニタ映像により確認し,目標管理値(±50mm)以内に収まるよう,繰り返し据え付け作業を行った。
また,据え付け高さについては,無人測量により事前に据え付け位置の下層部甚礎コンクリート高さを測定し.ベースプレート底面に鋼材(H-100)を所定の寸法で溶接することで調節した。
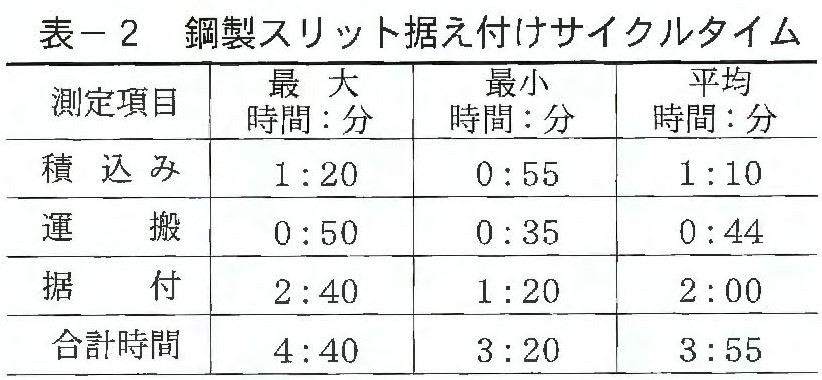
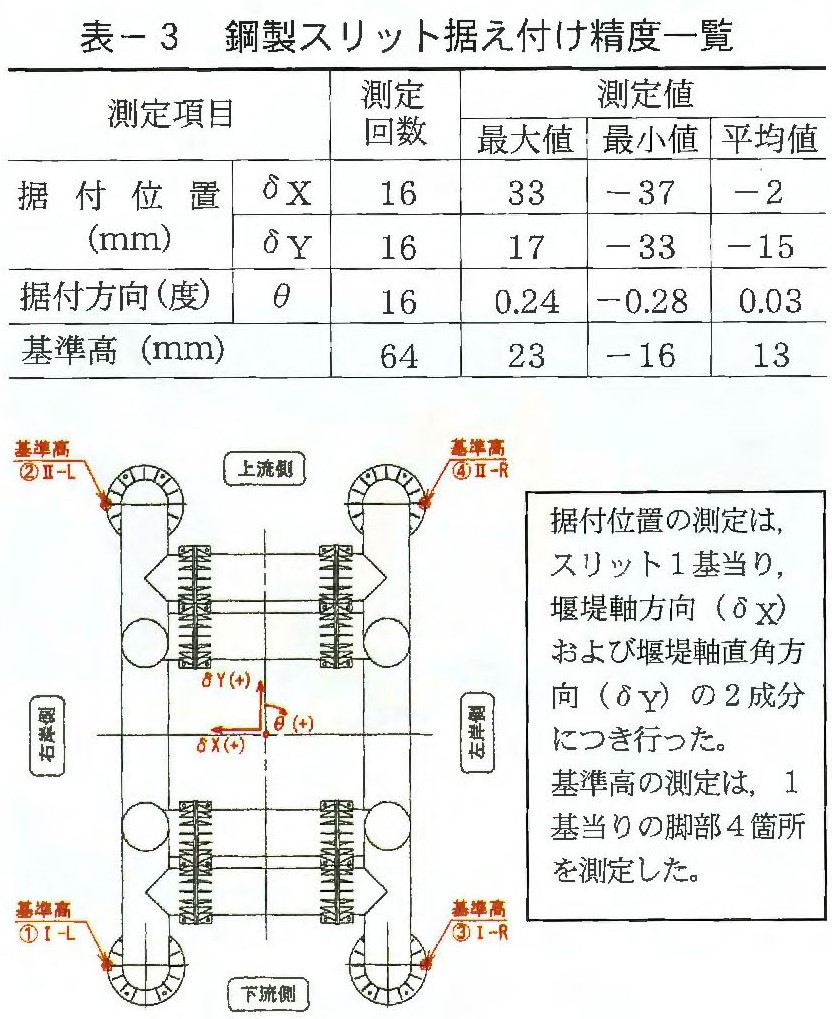
鋼製スリットの据え付けは,左岸側・右岸側から交互に,1日当り2基を行った。表ー2および表ー3に鋼製スリット据え付けサイクルタイム,据え付け精度一覧を示す
(4)高流動コンクリートの運搬・打設
鋼製スリットの据付完了後有スランプコンクリートを用いて根固めを行う(上層部基礎コンクリート)。本工事では,鋼製スリット本体が障害となり,無人化施工では通常の締固め機械を用いた施工が困難であった。そのため上層部基礎コンクリートは,特別な締固めを行わずともスリット脚部の隅々までコンクリートを充てんし,打設完了時の天端が平坦となるよう.高流動コンクリートを採用した。

① 高流動コンクリートの運搬
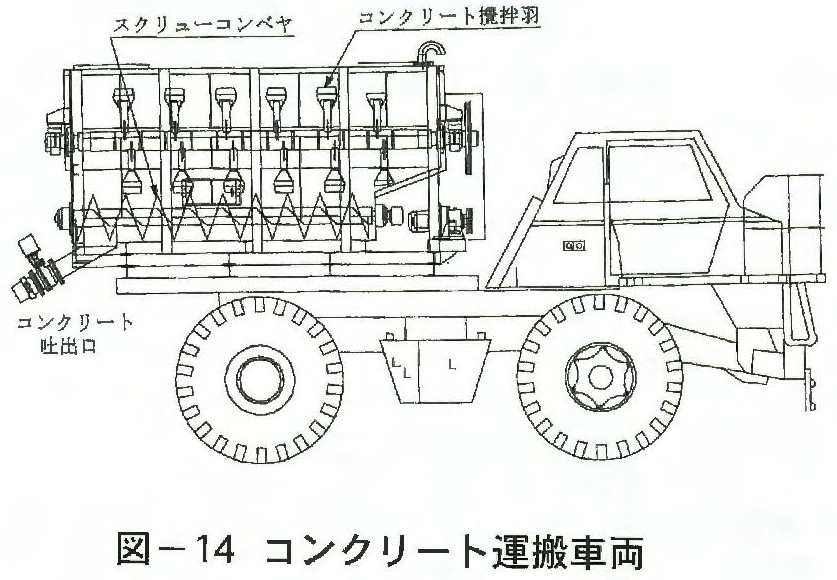
打設現場までのコンクリート運搬は,45t重ダンプを改造し,18m3積タンクを搭載したコンクリート運搬車両を用いて行った。この運搬車両は,攪拌羽によるアジテート機能を有する他,無人化施工に対応するため次の機能を追加して設置した。
・コンクリート残量検知ランプ
タンクを支持する4箇所の支柱にひずみゲージを取付け,内容量の変化に伴うひずみ値を検出することで,残量1/4でランプが点灯するよう設定した。
・タンク内壁への居付防止素材の取付け
粘性の高い高流動コンクリートがタンク内壁に居付くのを防止するため,特殊な高分子樹脂系のシートを貼り付けた。
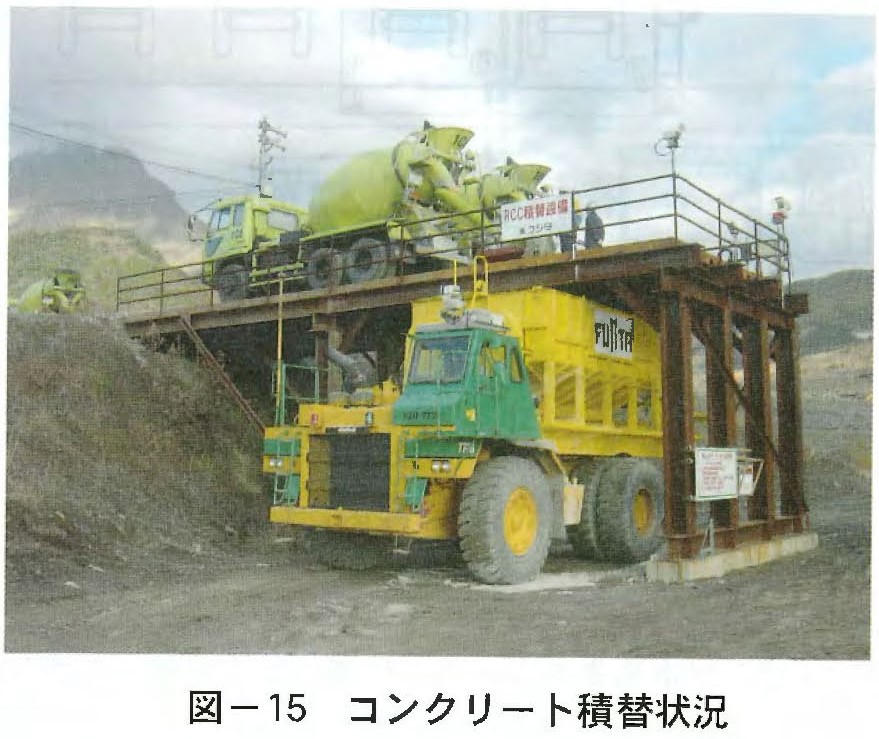
タンクヘのコンクリートの積み込みは,図ー15に示すとおり,有人区域に設置したコンクリート積替構台を使用する。
② 高流動コンクリートの打設
高流動コンクリートの打設は,有人区域において事前に試験施工を行い,以下に示すとおり問題点の抽出,および改善対策を実施した。
【問題点】
・流動距離が4mを超えると材料分離の傾向が大きくなる。(施工後コア採取により確認)
・打設エリアが広く,セルフレベリング性能だけでは,十分な仕上がり天端の平坦性が得られない。(6mで最大20cmの高低差が生じた)
【改善対策】
・ポンプ車の筒先を頻繁に移動させ,打設エリア内での流動距離を短くし,同時に天端の平坦性も確保する。
・バックホウのアタッチメントに均しコテを取付け,打設天端を揺動することで,セルフレベリング性能を助長する。(天端均し用パックホウの導入)
以上の改善対策を考慮して,図ー16および図ー17に示す機械配置にて高流動コンクリートの打設を行った。
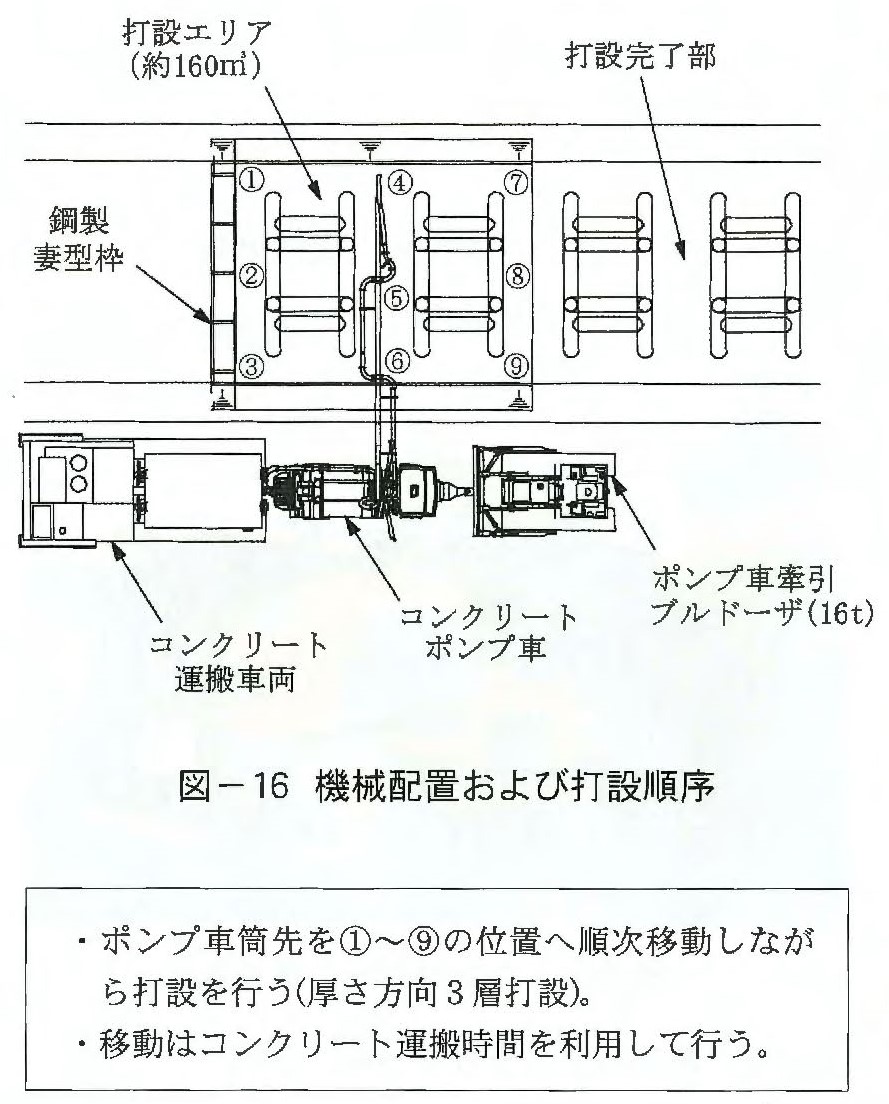

高流動コンクリートの打設は,4tコンクリートポンプ車(ブーム長16m)をベースに,ブーム操作,ピストン操作,エンジン回転数等の打設に必要な操作系統を遠隔操作可能なものに改造して行った。また,ポンプ車の移動は,遠隔操作によるブルドーザ(16t)牽引方式とした。遠隔操作室でのコンクリート打設状況を図ー18に示す。

打設中は,ポンプ車の筒先移動が困難な堰堤上流側に,コンクリート均し用バックホウを補助機械として配置した。打設天端を揺動することでセルフレベリング性能を助長し,仕上がり天端の平坦性を確保した。仕上げ状況を図ー19に示す。

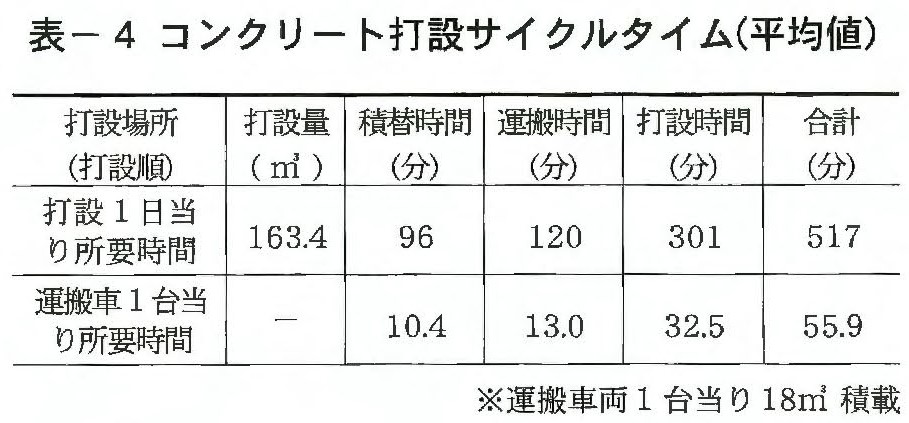
コンクリートの打設は,左岸側・右岸側から交互に2日に1回のサイクルで行った。1日あたりの打設量は,鋼製スリット2基分を1スパンとして,約160m3(運搬車両9台分)であった。また,妻型枠の脱型は打設完了後48時間とし,脱型次スパンヘの据え付けを,鋼製スリット把持装置を用いて行った。コンクリート打設工に関するサイクルタイムの平均値を表ー4に示す。
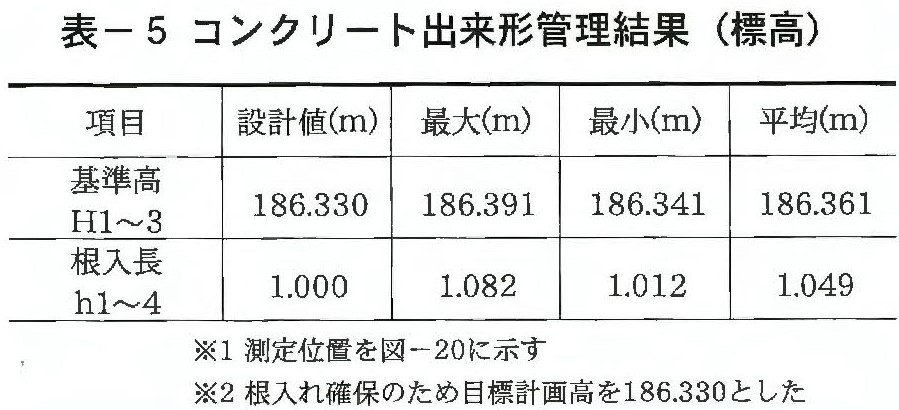
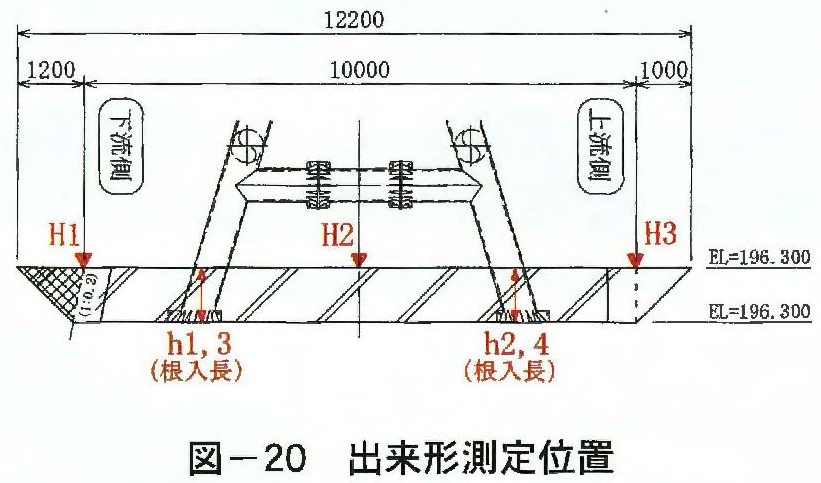
コンクリートの出来形は,ポンプ車筒先の移動および天端均し用バックホウの導入により,±50mm程度と,高精度な施工が行えた。表ー5および図ー20にコンクリート出来形管理結果を示す。

5 その他の無人化施工機械
本工事の施工に当り,無人化施工における創意工夫の提案として,以下に示す無人化施工機械の導入を試験的に試みた。
(1)無人スイーパ
50cm毎の積層構造となるRCCコンクリートの施工において,打設面清掃を行う遠隔操作機械として導入。

(2)無人散水車
コンクリートの打設・養生に伴う散水作業を,遠隔操作重機にて実施。作業半径30mのエリアへの散水が可能。

6 まとめと今後の課題
本報告では,水無川3号鋼製スリット砂防堰堤工事において実施した鋼製スリットの無人化施工について,施工方法とその成果を紹介した。大型建設機械を用いた無人化施工でありながらも,有人施工と比して遜色のない施工精度を確認したこと,また,従来,締め固め等の打設管理が困難な「狭部」等に適用されてきた高流動コンクリートを,品質確保の観点から広範囲な打設面積に適用した本工事の事例は,新たな実績として今後の無人化施工技術への展開を可能とした。
本工事の施工を通した考察を以下に列挙する。
(1)鋼製スリットの据え付けについては,マーキング位置やカメラ配置の工夫,試験施工によるオペレータの熟練および据え付け作業を反復して実施することにより,据え付け精度を規格値±100mm(施工目標値±50mm)に対し,±40mm以内という精度で行うことが出来た。しかし,今回の精度確認はあくまで有人での測定によるものである。今後は操作室において,誤差を確認しながら据え付け作業を行うシステムの確立を図っていく必要がある。
(2)鋼製スリットの塗装面保護については,把持装置やスリット運搬車両受台の,鋼製スリット塗装面との接触部分を布製の保護材等にて防護したが,今後は無人化施工に対応する有効な保護方法について検討の必要がある。
(3)高流動コンクリートの打設作業に関しては,ポンプ車の筒先移動およびコンクリート天端均し用バックホウの導入により,±50mmの範囲で平坦に仕上げることが出来た。今後は,コンクリート仕上がり高さの確認をカメラ映像による天端マーキングの目視確認ではなく,GPS等を利用した管理システムに移行することが課題となる。
(4)コンクリートの養生については,冬期という時期的な問題もあって,散水養生と湿砂養生を併用した。今後は施工時期に応じて,無人化の範囲でのその養生方法についての検討が必要となる。
(5)施工機械については,コンクリート運搬車両及びポンプ車ともにコンクリートの閉塞に対する安全性の向上(構造の工夫,性能アップ),またポンプ車については,ブルドーザによる牽引方式の改善が今後の課題となる。
(6)鋼製スリットの位置出しとして実施した無人測量は±20mm以内という高い精度を得ることができた。
これらを可能とした本工事の施工実績は,従来の技術を踏まえて開発された新しい技術によるものであり,平成6年度から約10年かけて官民一体となり進めてきた無人化施工技術の結果である。
今後はより一層危険な上流域での施工となるため,作業には完全無人化による施工が要求されることとなる。今回,世界で初めて実施した鋼製スリット砂防堰堤工事の無人化施工の成果は,今後の完全無人化に向けての大きなステップとなる。