
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ垂直離着陸(VTOL)機による長距離河川巡視実証
~河川管理のDX・管理用通信設備(K-PASS)の活用~
~河川管理のDX・管理用通信設備(K-PASS)の活用~
国土交通省 九州地方整備局
企画部 技術管理課
課長補佐
企画部 技術管理課
課長補佐
南 竹 知 己
キーワード:河川巡視、DX、ドローン、UAV、K - PASS
1.はじめに
河川管理において、UAVによる巡視・点検が有効であることは様々な実証で明らかとなっている。一方、多く用いられているマルチコプター型のドローンは、河川巡視のような長距離区間を巡視する用途に用いる場合、航続距離の短さや通信距離の限界により、複数回離着陸を繰り返す必要があることが課題となっている。これらの課題を解決する手法として、高速・長距離飛行が可能かつ、垂直離着陸やホバリングが可能な垂直離着陸(Vertical TakeOff and Landing aircraft = VTOL)機を、管理用光ファイバを利用した管理用無線通信設備(Kokudokotsusyo Patrol Assist System =K-PASS)を用いて遠隔制御し、迅速かつ効率的に巡視する実証実験を実施したので報告する。
2.河川巡視・点検の現状と課題
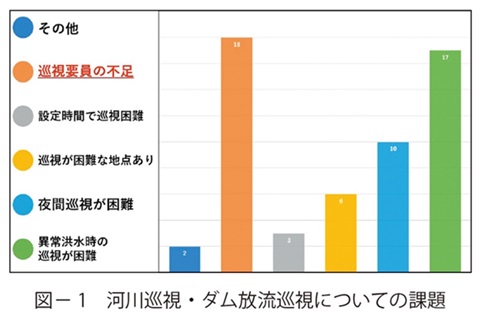
現在の河川巡視・点検は、河川砂防技術基準(維持管理編)に基づき実施されており、内容や頻度が各河川に応じて設定されている。河川巡視やダム放流巡視における課題について、九州地方整備局の河川系事務所職員約60名にアンケート調査を実施したところ、図- 1 のような結果が得られた。
最も多い意見は「巡視要員の不足(56%)」であり、人員の確保に不安を抱えていることが伺える。なお、これらの課題に対して求められる対策としては、図- 2 のような回答が得られた。
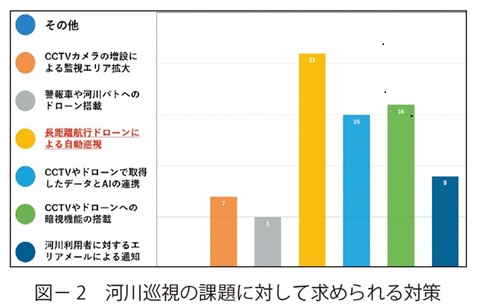
最も回答が多かった「長距離航行ドローンによる自動巡視」は66%もの職員が選択している。ただし、同じドローンの利活用であっても「警報車や河川パト車へのドローン搭載」については最もニーズが低く、回答者に聞き取りをしたところ、河川パト車へのドローン搭載は、機体の組み立てや操縦が必要であることから巡視時間や手間が増える懸念(業務効率化とならない)があるとのことであった。なお、「長距離航行ドローンによる自動巡視」と「取得したデータとAIとの連携」のクロス集計では両方を選択した者が52%と約過半数で、人員不足や巡視の安全性に対応するための自動化や効率化を求めていることが分かった。
3.長距離航行可能なVTOL機
災害時の被災状況調査において、ドローン(以下「UAV」Unmanned Aerial Vehicle と記述)は非常に有効な手段として既に広く用いられているほか、構造物点検や砂防巡視、河川巡視で地上からの視認が困難な場所での利用が進められている。一方、これらに用いるUAVは低速飛行やホバリングを得意とするマルチコプター型であり、特定地点の詳細な調査には適している反面、数キロを超えるような河川巡視などの長距離航行には不向きである。しかし近年、長距離航行が可能なUAVとしてマルチコプター型の機体にエンジン駆動の発電機とバッテリーを搭載したハイブリッド型マルチコプターや、高速・長時間の飛行が可能な電動固定翼型の機体が開発されており、各地で試験や実運用が始まっている。今回の実証では、VTOL 機と呼ばれる高速・長距離飛行が可能な固定翼型と垂直離着陸とホバリングが可能なマルチコプター型の両方の特徴を兼ね備えた電動の機体を用いた(写真- 1)。

離着陸時やホバリング時には4発のマルチコプター(クワッドコプター)として飛行するため、滑走路やキャッチネットが不要である。巡航時には機体後方の推進用プロペラ1発による固定翼機として飛行し、主翼で揚力を得ることから高速かつ長距離の飛行が可能である。また、固定翼失速時には、マルチコプターモードに自動遷移する機能が安全対策として備わっている。
4.管理用通信設備(K-PASS)
長距離航行を実施する上で、課題となるのが「機体との通信確保」である。一般的なUAVは機体と操縦装置が一対一で通信しており、操縦位置から機体が目視外(見通し外)となる飛行は技術的・法的に制約がある。また、自律飛行の場合は航空法審査要領に基づき、航行中に不具合が発生した時には操作介入(遠隔操縦に切替)しなければならない規定があり、機体を常に制御出来ることが求められる。そのため、見通し外の長距離飛行では、通信手段として携帯電話回線が多く用いられる(携帯電話の上空使用は電波法の規制があり、特別に許可された通信カードが必要)。ところが、携帯電話は電波法の規制により地上での利用が前提で上空での使用は本来想定されていない。そのため上空では通信エリアが限定され、データ伝送に遅延が発生する等、制約がある事が知られている。河川巡視でUAVを用いる場合、映像を見ながら遠隔での操縦を行う必要があり、通信エリアの制約や通信の遅延の課題は解決する必要がある。
携帯回線の上空利用における課題を解決するために用いた手段が管理用通信設備「K-PASS」(以下、「K-PASS」と記述)の利用である。K-PASSは国が管理する河川や道路に敷設された管理用光ファイバに基地局を設置して自営通信網を構築するシステムである。基地局は、CCTVカメラや水位・雨量観測所、情報板等、光ファイバに接続された既存設備に設置する。複数の基地局を自動的に切り替えながら通信(=ハンドオーバー)することで、管理区間内に連続した通信エリアを確保することが出来る。以下にK-PASSのシステム構成図(図- 3)と設置された基地局(写真- 2)を示す。
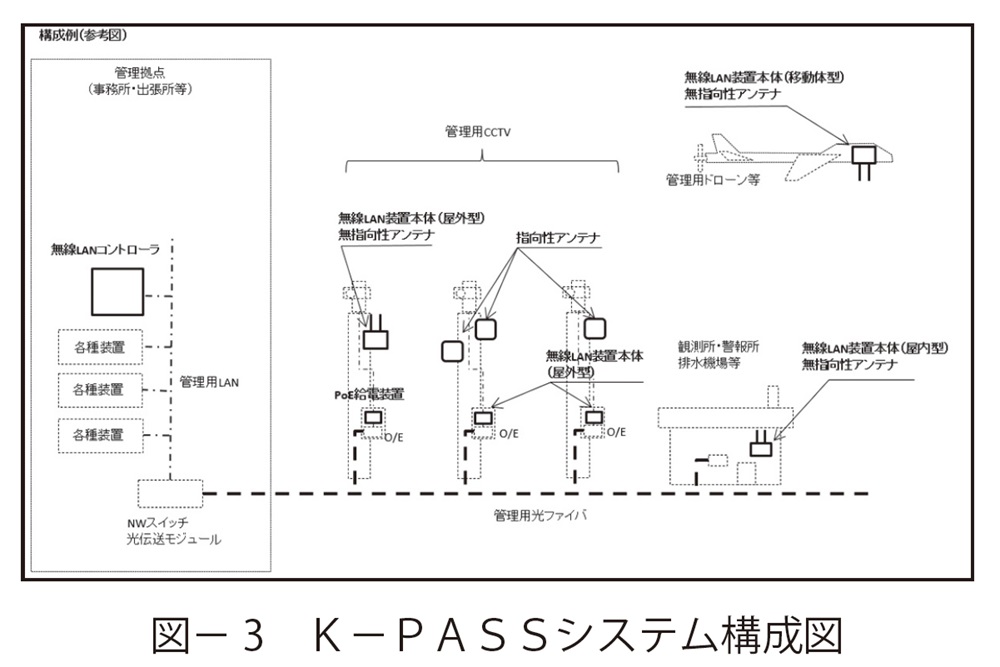

K-PASSはUAVの制御以外にも、巡視パト車とのデータ通信や巡視端末の利用、無人除草機械や巡視ロボットの監視制御、現場からのリアルタイム映像や点群データの伝送等にも利用することが可能であり、管理区間内で「上空も含めて」連続的に運用することで河川管理のDXを実現するための新たなデジタル基盤と見做すことが出来る。
5.UAVによる河川長距離巡視実証実験
(1)実証実験フィールドの選定
実証実験を実施するフィールドは、以下の条件に基づいて検討し選定した。
① VTOL 機の航続距離内(概ね50km)で実施可能でありかつ、平均的な河川出張所の管理区間延長をカバー出来ること(概ね20km)
②制約が多い都市部(DID 地区)を除く
③道路や鉄道の橋梁横断が避けられないことから、橋梁横断について法令上の手続きを含む、管理者との調整が整う区間であること
④放流巡視でも活用することを考慮し、ダム放流警報区間が含まれること
⑤施設管理用光ファイバが敷設され、K-PASS基地局が容易に設置できるCCTV等の管理設備が数キロメートル毎に配置されていること

これらの条件を検討した結果、福岡県と大分県の県境を流れる山国川を選定し、耶馬溪ダム管理支所から山国川河川事務所までの25kmを実験区間として設定した(図- 4)。実際の長距離河川巡視では、立入が規制された水面上を目視外飛行し、橋梁横断箇所で補助者の配置を要さずに飛行できる「レベル3.5」が求められるが、実証では安全に配慮し、全区間に補助者を配置して水面上空のみを飛行させる「レベル2」で実施した。なお、通信手段の比較を行うために上流3/4区間を携帯電話回線、下流1/4 区間をK-PASSを用いて運用することとした。
(2)山国川における実証実験
今回の実証実験は、初の試みであることから、以下の段階に分けて課題を慎重にクリアした上で徐々に飛行距離を伸ばし、最終的には25km全区間での公開実証実験の実施を目指した。
①機体メーカー試験コースでの周回運用試験
②シミュレーターでのバーチャルフライトによる現地検証
③上空での携帯電話エリア電界強度測定調査
④携帯電話回線区間での飛行試験
⑤ K-PASS区間での飛行試験
⑥携帯電話回線とK-PASSの切り替え試験
⑦全区間(25km)での飛行試験
⑧公開実証実験(令和5年3月16日(木))
実証区間上空における携帯回線の電界強度測定調査では、地上に比べて通信エリアが狭いことが確認され、試験飛行においても最大30秒程度、映像伝送が切断される地点や映像の遅延が大きい地点が確認された。K-PASS区間ではアンテナ方向や帯域幅、変調方式等を調整しつつ徐々に飛行距離を伸ばし、3月の初旬に25kmの全区間で飛行試験を開始した。実験にあたっては補助者の配置のほか、高速道路や国道の橋梁横断について道路管理者や所轄警察署と協議し、橋梁の通過時刻について事前通告する手段を整えた。なお、操縦は機体から送信される映像とテレメトリーデータを山国川河川事務所で受信して実施した(写真- 3)。

令和5年3月16日(木)、テレビ局3局、新聞社3社が取材し、報道ヘリが追尾撮影する中、公開実証実験は実施された。耶馬溪ダムを午前10時30分に離陸して(写真- 4)実験はスタートした。離陸時は微風、曇天という気象状況であったが、途中の区間では小雨が降り出した。本機体は降雨の中でも運用可能であるため飛行継続を判断し、携帯回線区間を順調に通過、残り約6km地点でK-PASS網に切り替わり、午前10時50分には平成大堰上空に到達してマルチコプターモードに遷移した後、河口堰の模擬施設点検を実施、午前10時54分に無事着陸して実験は成功した。飛行距離は25km、所要時間は24分であった。

6.実証実験で得られた成果
(1)自営通信網による機体運用検証
自営通信網K-PASSを使用したUAVの遠隔操縦、映像伝送は成功し、携帯電話回線に比べ通信の安定性や低遅延の特性について優位性が確認された。具体的には、上空における携帯電話回線のサービスエリアが地上に比べて限定的である事や、回線速度について約300ms程度の遅延が生じる場合があり、UAVを遠隔操縦する場合には支障が発生する事などである。それに対し、K-PASS網では30ms 程度の遅延に留まり、UAVの遠隔操縦に及ぼす影響は僅少であった。本実験によりMCSや適応変調の設定についてFPV(一人称視点)に必要な映像の解像度と通信の確実性、ハンドオーバー時に基地局を切り替えるレベル閾値などについて十分な知見を取得することが出来た。ただし、今回のような山間部ではなく都市部などIMS バンドが混雑している地域でK-PASSを用いる場合、混信検討等について、別途検証が必要であると考える。
(2)VTOL機の検証と三次元点群データの取得
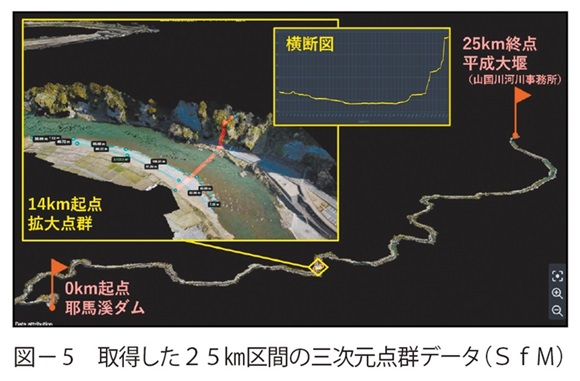
VTOL 機の運用については、山間部の旋回半径や固定翼モード及びマルチコプターモードにおける各種データが本実証により取得され、今後の実運用に資する有効な知見が取得出来た。一例として、マルチコプターモードではバッテリー消費が若干多いという事が判明しており、対策として離陸時には早期に固定翼モードへ遷移する運用や、カタパルトでの発進について引き続き検討する。取得した三次元点群データについては今回、25km区間におけるオルソモザイクと三次元点群データ(SfM)取得、処理を含め約90分でデータ共有を完了した(図- 5)。従来に比べて大幅な効率化を実現しており、既存のマルチコプター型UAVを用いたデータ取得に比べ、時間にして約10倍のDXを実現した。今後は取得したデータをAIで解析することにより、異常検知の自動化など、さらなる河川管理のDXが進むものと考えている。
7.まとめ
今回の実験により、自営通信網によるVTOL機の長距離河川巡視は現時点で十分実用可能であり、大幅なDXが実現出来ることが実証された。一方、レベル3.5飛行となることから、航空法審査要領の規定である落下分散範囲の設定や二等無人航空機操縦士・固定翼機限定の技能認証取得などが課題であり、実運用にあたっては法的な課題について航空局と個別協議を進めていく必要がある。
最後に、本実証実験に携わった(社)建設電気技術協会におかれましてはこの場をお借りして感謝申し上げます。
