
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ画像認識型交通量観測装置(AIカメラ)を活用した
初の一般交通量調査の実施について
初の一般交通量調査の実施について
国土交通省 九州地方整備局
道路部 道路計画第二 課調査係長
道路部 道路計画第二 課調査係長
平 野 篤
キーワード:交通情勢調査、AIカメラ、一般交通量調査
1.はじめに
(1)背景
全国道路・街路交通情勢調査(以下センサスとする)は、全国の道路と道路利用の実態を捉え、将来の道路整備の方向を明らかにするため、全国の道路状況、交通量等を調査するもので、概ね5年ごとに実施されている。
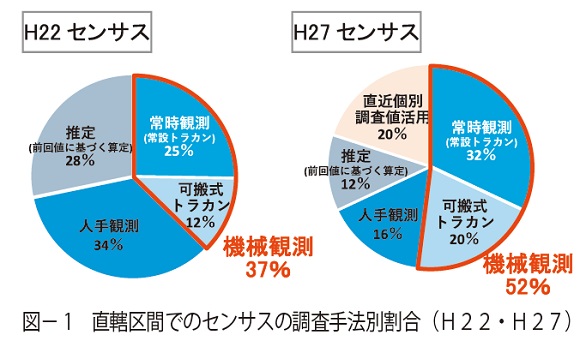
センサスの調査項目の一つである一般交通量調査は、従来、調査員による人手観測が主であったが、近年ではトラフィックカウンター等による機械観測の導入が進められており、直轄区間で見るとH22 センサスでは約37%、H27 センサスでは約52% と半数を占めた(図- 1)。令和3年度のセンサスにおいては、作業効率化及びコスト削減を図るため、調査員などの人手観測を更に削減し、直轄国道に配置されているCCTVカメラの画像データを人工知能による解析機能で分析することにより交通量を観測する画像認識型交通量観測装置(以下、AIカメラとする)の活用を初めて導入した。
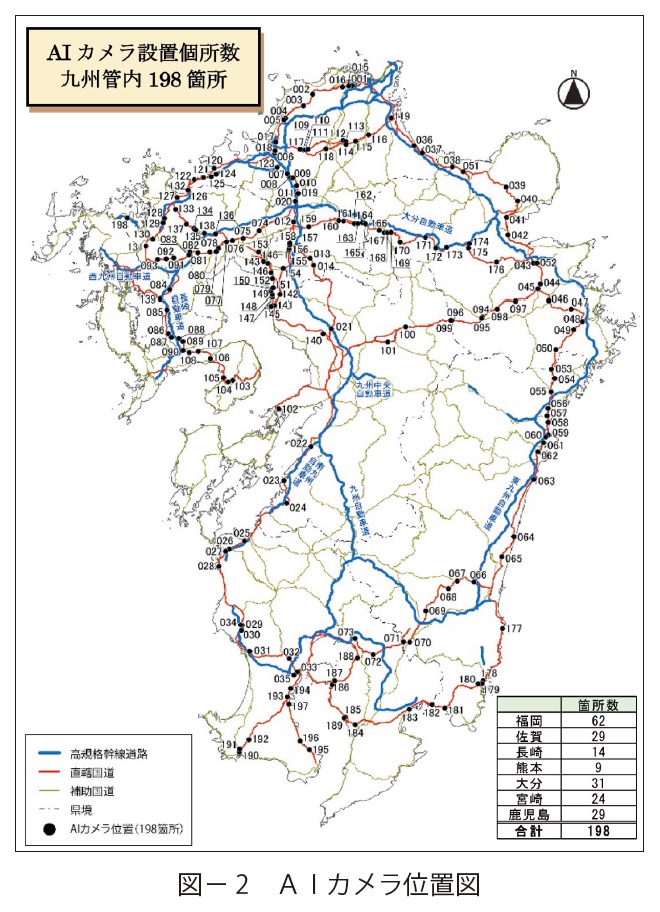
本稿では、九州地方整備局管内に設置されているAIカメラ198箇所を対象に精度検証を行い、精度が低い個所については、要因分析及び精度向上対策を実施したうえで、センサスの一般交通量調査に活用するまでの検討内容を報告する(図- 2)。
(2)AIカメラ
AIカメラとは、道路管理用に設置されたCCTVカメラの映像を基に、あらかじめ設定した画角と観測範囲内を走行する車両をシステムで認識し、交通量を観測するものである。
観測結果は5分間・1時間ごとに上下方向別・車種別(大型・小型)に集計され、観測時刻や機材の状況等と併せて記録される。
2.AIカメラの精度検証
(1)検証方法と精度基準
国総研から提示された観測条件や精度基準に従って精度検証を実施した。具体的には、混雑時(7時~ 9時)及び非混雑時(9時~ 17時)で、それぞれ最低5分間、対象方向の交通量が20台以上となるまでの時間でAIカメラ観測結果とCCTVカメラの録画データを目視した結果を比較した。精度基準は誤差率± 10% 以内とした。
(2)精度検証結果
①精度検証結果
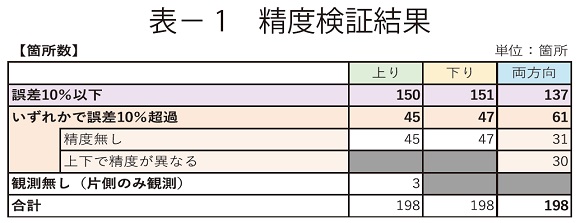
「令和3年度全国道路・街路交通情勢調査 一般交通量調査実施要綱 交通量調査編(R3.7)」において、非混雑時に全車交通量で所定の精度基準を満足する箇所は活用可能とあるため、非混雑時に着目して整理した。その結果、上下方向とも精度が確保できたのは137箇所(約69%)となり、61箇所(約31%)で精度が確保できなかった(表- 1)。
②問題発生の傾向分析
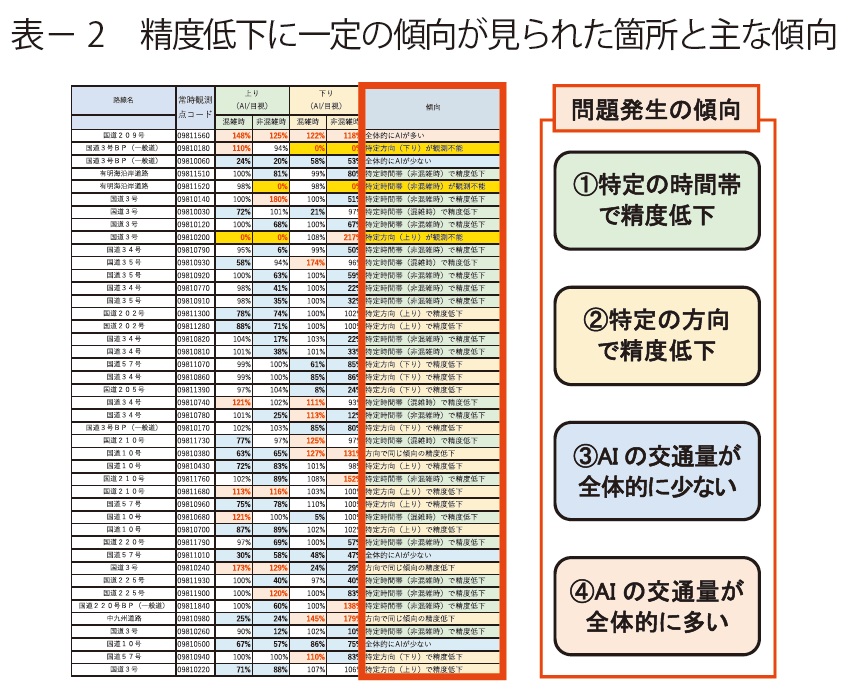
精度が確保できなかった箇所において問題発生の傾向に着目して要因を整理すると、43箇所で「①特定の時間帯」「②特定の方向」「③④ AI の交通量が全体的に少ない・多い」といった傾向が確認された(表- 2)。残りの18箇所では問題発生の傾向が混在し、一つの傾向には絞り切れなかった。
3.精度向上対策の検討
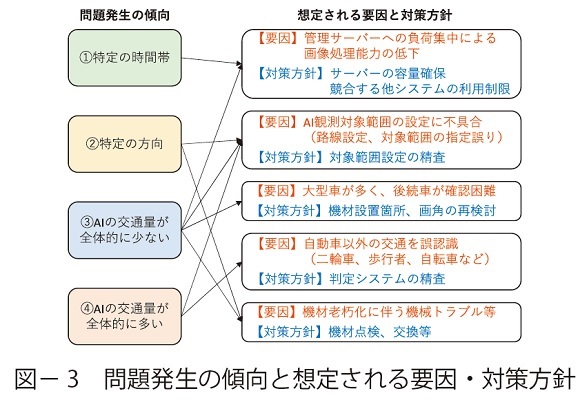
(1)想定される要因と対応方針
問題発生の傾向から、精度低下の要因と対応方針の関係性を整理した(図- 3)。最も多かったのは「①特定の時間帯で精度低下」で、43箇所のうち20箇所と約半数を占める。観測時にテレワークやWEB 会議が積極的に実施されていたこと、また梅雨時期であったため、河川など防災関連のシステムを広く運用していたことなどが重なり、整備局管内のサーバーに負荷がかかり、全てのデータを転送しきれなかったことが要因であったと想定された。このため、サーバーの容量確保や競合する他システムの利用見直しを検討することとした。
次いで「②特定の方向で精度低下」が多く、19箇所が該当した。AIカメラの観測範囲を個別に確認した結果、設定範囲が道路の枠外になっている箇所や交差点部を観測範囲とする箇所など、観測範囲の設定が不適切で、観測条件を満たすことが難しい状況になっていた。対策としては、適切な観測範囲の設定とプリセット位置の管理・維持体制への周知徹底が有効であると考えた。
「③ AI の交通量が全体に少ない」傾向となったのは3箇所で、大型車の交通量が多く、後続の小型車が重なって認識されないことが要因であると想定された。対策としては、機材設置箇所の変更や画角の再検討が有効であると考えた。
「④ AI の交通量が全体的に多い」傾向となったのは1箇所で、二輪車等を自動車と誤認あるいは観測範囲の誤設定で不要な車両を観測していることが想定された。対策としては、システムの確認及び観測範囲の設定見直しが有効であると考えた。
その他の18箇所は、これらの要因が複合的に影響しているものと想定された。
(2)精度向上対策
前述の精度向上への対策方針を基に、AIカメラのシステムを管理する情報通信技術課と協議のうえ、対策を行った。
まず、サーバーへの負荷状況の見直しを行った。本調査を行う9月時点で不要となる他のシステムを確認・稼働させないよう事務所へ連絡するとともに、サーバーの容量拡大を行った。
また、サーバーへの負荷軽減を図るためAI カメラの画質を低下させていたが、システムが車両を認識することが困難な状態まで画質が下がっていたことが判明したため、サーバーの稼働に影響がない範囲で可能な限り画質の改善を行った。
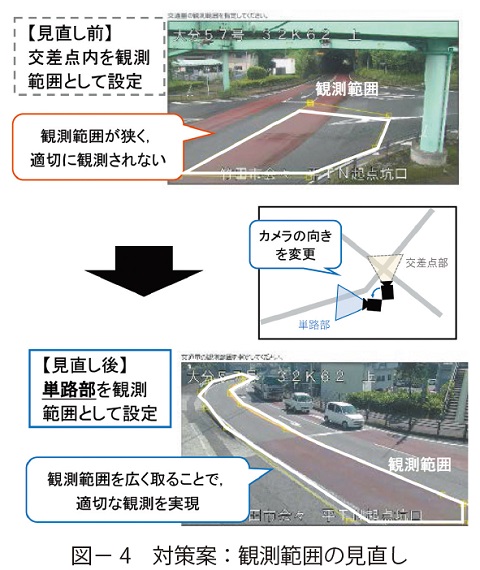
次に、カメラの画角と観測範囲の設定見直しを進めるにあたって、AIカメラの観測条件を確認した。AIカメラが車両を認識する条件として、「設定した観測範囲内に車両が2 秒以上存在し、かつ観測範囲内のセンターラインを跨ぐ」ことが求められる。この条件を満足することを前提に問題箇所に着目すると、特に交差点部にカメラが向いている箇所では、観測範囲が限定的となり、条件を満たしにくい状況であることが判明した。そこで、観測範囲を広く確保し、適切に観測ができるようにカメラの画角を単路部に向ける等の調整を行った(図- 4)。
その他、AIカメラが適切に交通量を認識するためのプリセット位置を本局であらかじめ登録していたものの、災害時等に事務所側がカメラの画角を変更したままで所定のプリセットに戻しておらず、画角と観測範囲が不適切な状況が確認された。このため、AIカメラの観測に適した画角と観測範囲を設定したプリセット位置を設定するとともに、各事務所に対して、画角は基本的に所定の位置にすること、動かした際は必ず所定の位置に戻すこと等の連絡を行った。
(3)効果検証
前述の対策を実施したうえで、61箇所を対象に再度精度検証を実施した。精度基準は2章と同様に誤差率± 10%以内とし、非混雑時の検証を行った。
61箇所中で精度が確保できたのは57箇所となり、4箇所で精度が確保できない結果となった。
当初より精度が確保できていた137箇所と併せて194箇所(約98%)は、AIカメラによる観測結果を一般交通量調査に活用することとし、精度が確保できなかった4箇所では、CCTVカメラの録画データを基にしたビデオ観測を行った。
4.一般交通量調査への活用
(1)AIカメラの活用方針の整理
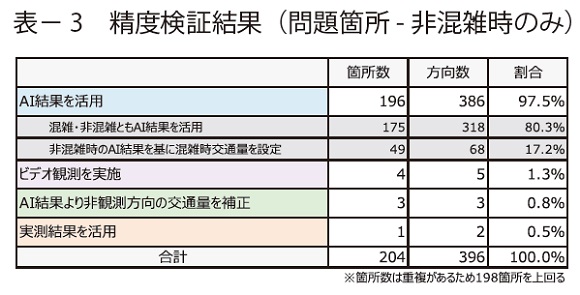
AIカメラの観測結果を活用するにあたり、「令和3年度全国道路・街路交通情勢調査 一般交通量調査実施要綱 交通量調査編(R3.7)」に、片方向だけでも所定の精度(誤差率± 10%以内)を満たしていれば一般交通量調査への活用が認められることになっているため、“箇所” ではなく“方向” に着目してAI 観測結果の活用方針を整理した。
AIカメラの結果を活用するのは386方向、AIで精度が確保できないためビデオ観測の実施が5方向、AIカメラが片方向しか観測していないために非観測方向の交通量を補正するものが3方向、実測したものが2方向となった(表- 3)。
(2)一般交通量調査への活用
①両方向でAI 観測をした場合の活用方法
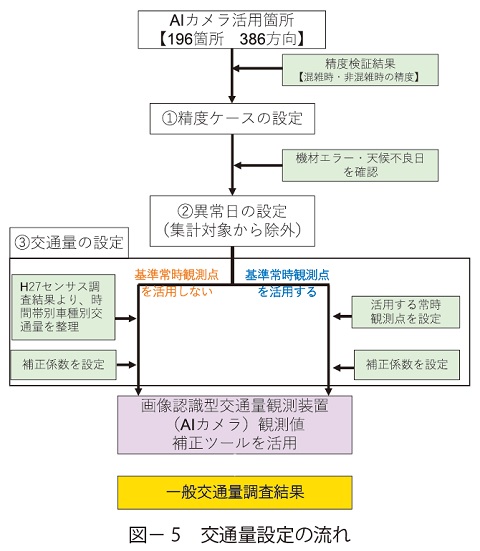
AIカメラの交通量を一般交通量調査へ反映させるための補正を行い、時間帯別・車種別の交通量を設定した。具体的には以下の手順で補正を行った。
まず、検証により精度が確保できた時間帯(混雑時・非混雑時)を整理して、観測方向ごとに分類した(①精度ケースの設定)。次に、令和3年9月の AI 観測結果の中で、各事務所からプリセット位置の変更や機材トラブル等の報告を受けた日、天候不良日等を異常日として設定し、それらの結果を異常値として除外した(②異常日の設定)。さらに、 AIカメラ観測箇所に近接する常時観測点やH27 センサスの観測地点を選定し、各調査結果から時間帯別・車種別の交通量比率を設定した。AI 観測結果に時間帯別・車種別の交通量比率、精度検証結果を基に算出した補正係数(目視交通量÷ AI 交通量)を乗じて一般交通量調査用の交通量を設定した(③交通量の設定)。
なお、近接区間は、交通の流動が大きく変わらない区間を選定することとした。
ここで、交通量設定については、国総研から配布された「画像認識型交通量観測装置(AIカメラ)観測値補正ツール」を活用し、前述の条件を調査区間ごとに整理したうえで実施した(図- 5)。
②片方向でのみAI 観測をした場合の活用方法
AIカメラの観測が片方向のみである3方向については、「令和3年度一般交通量調査結果とりまとめに向けた作業について(R3.11)」に示されている「観測レベルが異なる区間の交通量推定に関する補正方法」に準じて、観測方向の交通量を基に設定した。具体的には、AI 観測結果を基に設定した交通量(観測した方向)に、当該区間のH27 センサスの調査結果から、12時間交通量の上下方向比率を乗じて非観測方向の12時間交通量を推定した。時間帯別・車種別交通量の設定については、推定した12時間交通量に同区間の時間帯別・車種別交通量調査結果から比率を設定して算出した。
5.最後に
検証結果を車線別にみると2車線区間の約半数で誤差が無い結果であるのに対し、4車線以上の区間では3分の2以上で誤差が発生している(図-6)。
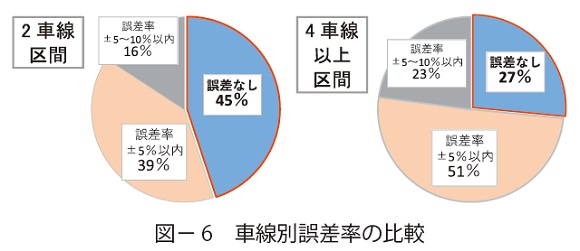
これは、交通量が多いため車両の重複等の発生頻度が高く、AIカメラが車両を認識しづらい傾向になっているためと考えられる。カメラの画角や設置高度の検討など、車両同士の重複による観測漏れを改善する対応が求められる。また、AIカメラによる観測は、低照度下では難しいため、一定の照度を確保できる地点の選定または夕方や夜間の観測を補正できるよう、あらかじめ近隣の常時観測点等の観測箇所を把握しておくことが望ましい。
今回設定したAIカメラの観測範囲は所定のプリセット位置での観測が前提となるため、プリセット位置を変える場合や、カメラの交換等を行う場合は、関係部署と情報共有を図り、適切な画角が設定されている状態を維持していく必要がある。
今後、効率的かつ経済的な手法としてAIカメラを用いた交通量観測が増えていくことが想定されるため、引き続きAIカメラの精度向上に向けた検討を行っていくこととしている。
