
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ土木研究所におけるAHSの取り組みについて
~自動運転道路システム(AHS)~
~自動運転道路システム(AHS)~
建設省土木研究所道路部
高度道路交通システム研究室
研究員
高度道路交通システム研究室
研究員
村 田 重 雄
1 はじめに
「ドライバーはエンジンをかけて目的地を入力するだけ。あとは,車が自動的に目的地まで連れていってくれる。」そんな車をSF小説の中で読んだことはありませんか?このまさに自動車と呼べる車は,これまで小説の中の世界にしかありませんでしたが,その夢のシステムがまた一歩現実になろうとしています。
最近の電気・通信等の技術の進歩は目覚ましいものがあり,様々な産業分野においていろいろなものが高度化されてきています。それは道路交通の分野でも同様です。最先端の電気・通信等の技術を用いて,道路と車,車と車が連絡を取り合うことによって,車の走行を自動化するシステムの研究が進められています。この夢のシステムが自動運転道路システム/AHS(Automated Highway System)なのです。
2 AHSの概要
現在,道路交通の高度情報化については,世界各国が重要な政策として取り上げて強力に推進しています。我が国においても,平成7年2月に政府が策定した「高度情報社会推進に向けた基本方針」の中で,道路・交通・車両分野の情報化が取り上げられており,高度道路交通システム/ITS(Intelligent Transport Systems)として官学民との連携を図りながら強力に推進しております。ITSはナビゲーションの高度化や歩行者等の支援など9つの開発分野によって構成されており,その中で最も高度なシステムの1つがAHSなのです。
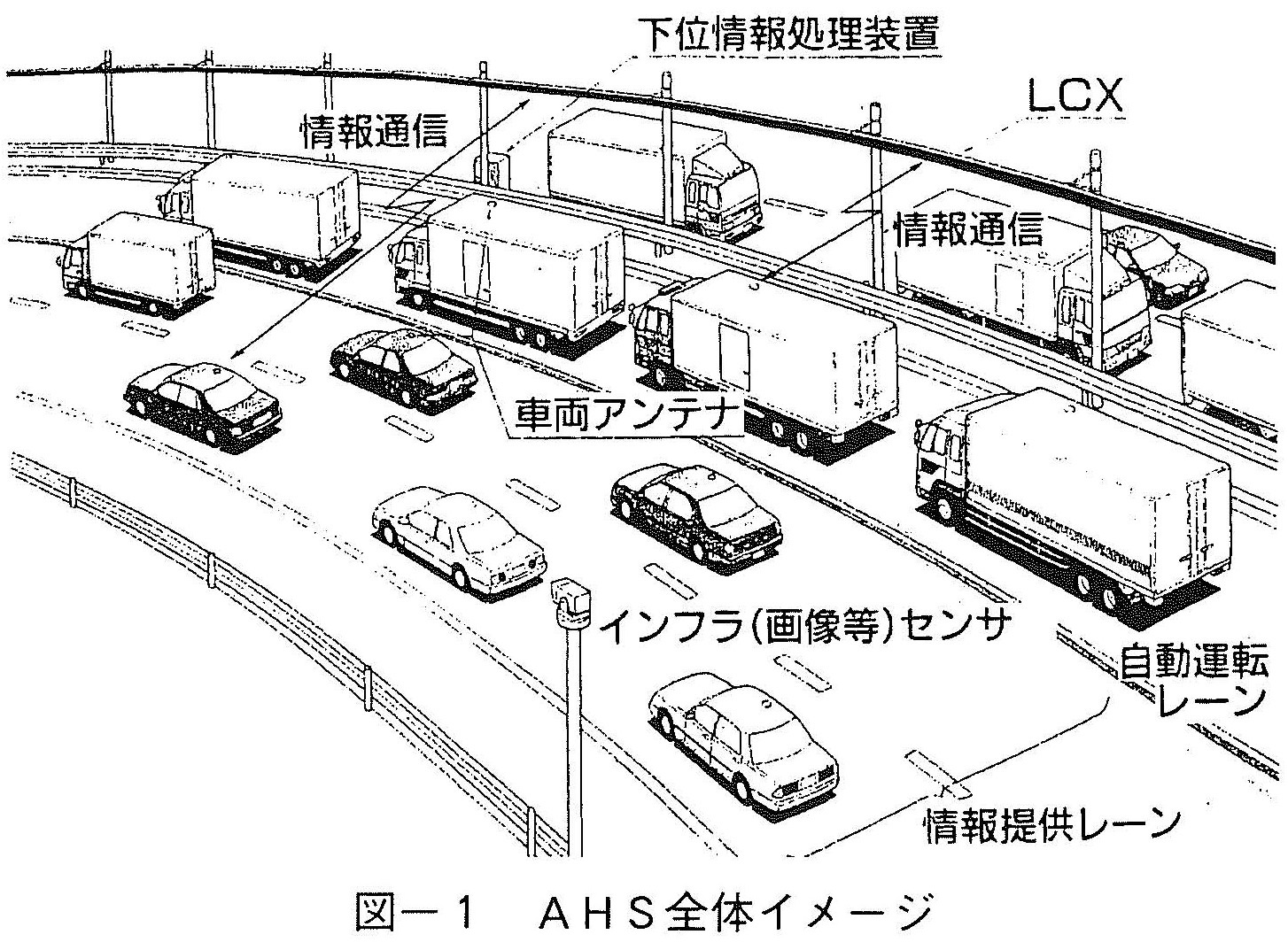
AHSの全体イメージは図ー1に示すとおりで,道路の情報インフラと自動車に搭載した通信機で行う「路車間通信」と自動車同士で行う「車車間通信」および車両の自動制御によって成り立っています。雨や霧などによる視界不良時や高速道路での多重衝突事故などの時,「いち早く危険を察知できれば…」と誰もが思うでしょう。AHSは運転者のこのような願いに応え,リアルタイムで情報をやりとりすることで運転者の判断を助け,安全性を確保します。また万一,判断を誤った場合でもダメージを最小限にくい止めるようシステムが働き運転者を保護します。最終的には自動運転の実現を目指しており,ヒューマンエラーをカバーし,安全運転を支援すると同時に,道路交通の円滑性の向上や道路環境の改善が期待されています。また,自分で運転を楽しみたいときはマニュアルで,疲れたり,必要がある場合には自動運転でとAHSは運転の選択の幅も広げます。
3 実験システムの概要
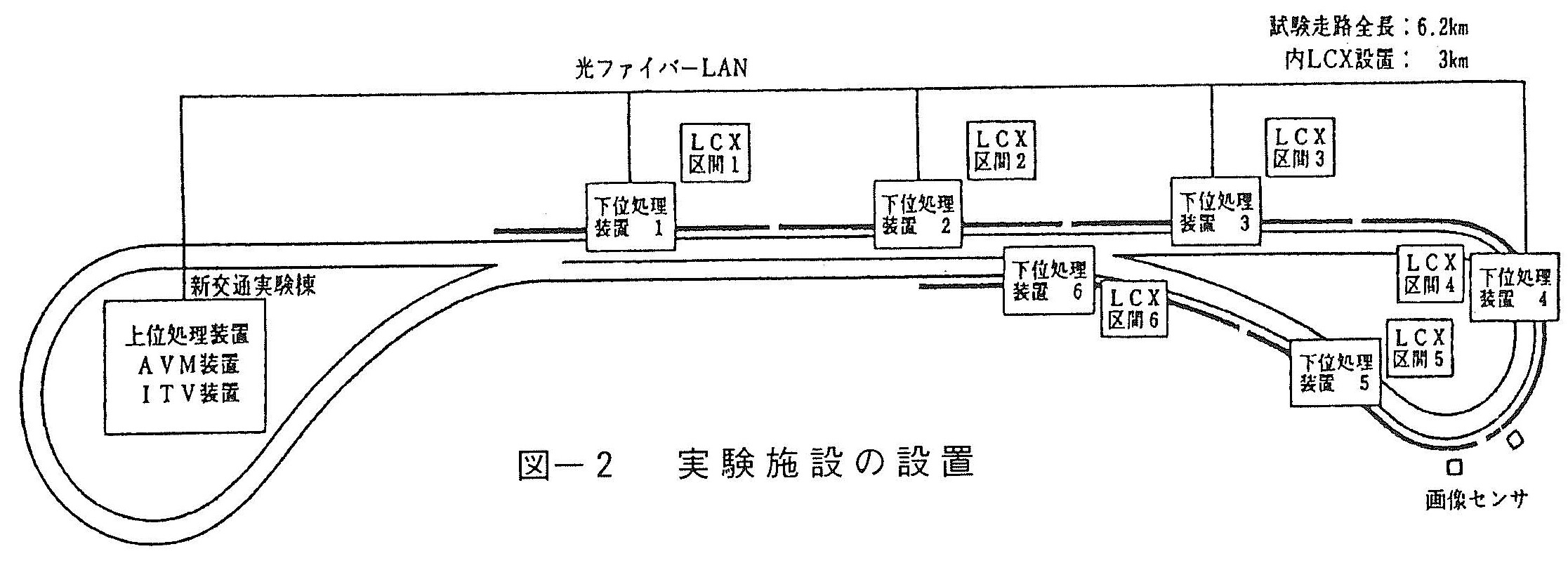
AHSの研究開発には道路交通に関する他,自動車や電気通信といった様々な分野の技術が必要となります。そのため,建設省土木研究所では自動車関連や電気通信関連等の多分野に亘る民間企業25社と共同で研究開発を行っています。土木研究所構内の試験走路に図ー2に示すような実験施設が完成しており,平成7年11月からシステムの要素技術や基本機能の検証実験を行っています。今後より複雑な実験を実施するために,試験走路全周にわたる実験施設の整備を進めているところです。以下では,土木研究所に設置しております実験設備について簡単に説明いたします。
(1)連続通信ケーブルと情報処理装置
試験走路には路車間連続情報通信用の連続通信ケーブルとして漏洩同軸ケーブル(LCX:Leaky coaxial cable)が1区間500mで合計3km(最終的には12区間,6.2km)に亘って設置されています。この通信媒体から車両に対して指示速度や道路の形状(線形),また道路上の事故などの情報を伝達します。車両からは現在の位置や速度の情報がインフラ側に送信されてきます。
通信周波数は準マイクロ波の2.6GHz帯を使用しています。道路から車,車から道路という通信を行うため2種類の周波数を用いていますが,2波の間隔が60MHzほどしか離れていないことから,車両では1つのアンテナで送受信を兼ねることができます。
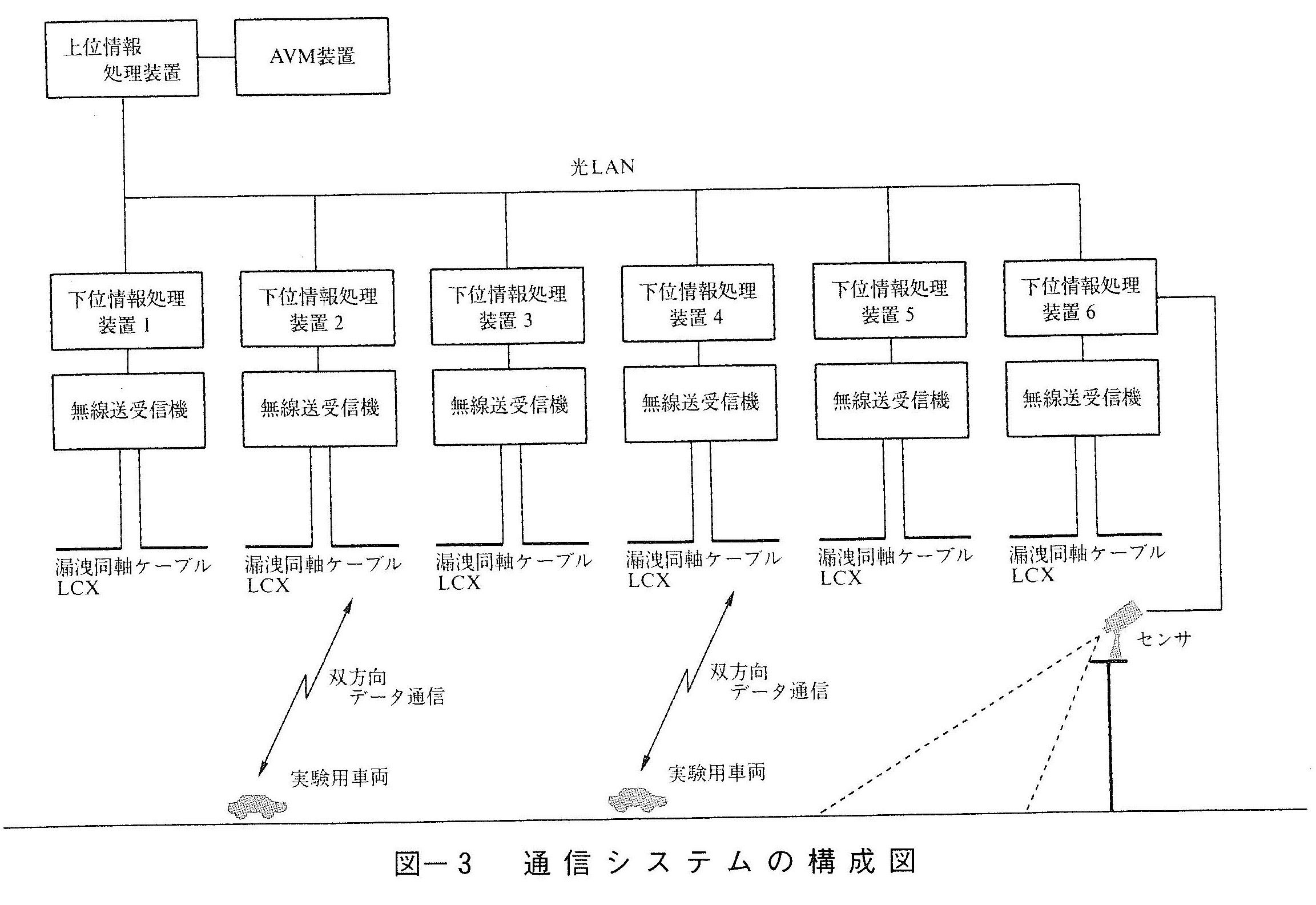
それぞれのLCX区間には下位情報処理装置が設置されており,区間内を走行する車両との通信,他のLCX区間や道路上の各種センサとの情報交換を行っております。また,下位情報処理装置は,上位情報処理装置と通信を行っています。上位情報処理装置は下位情報処理装置を統括するもので,実験システム全体を監視,制御しています。通信システムの構成を図ー3に示します。
(2)通信フォーマットと通信サイクル
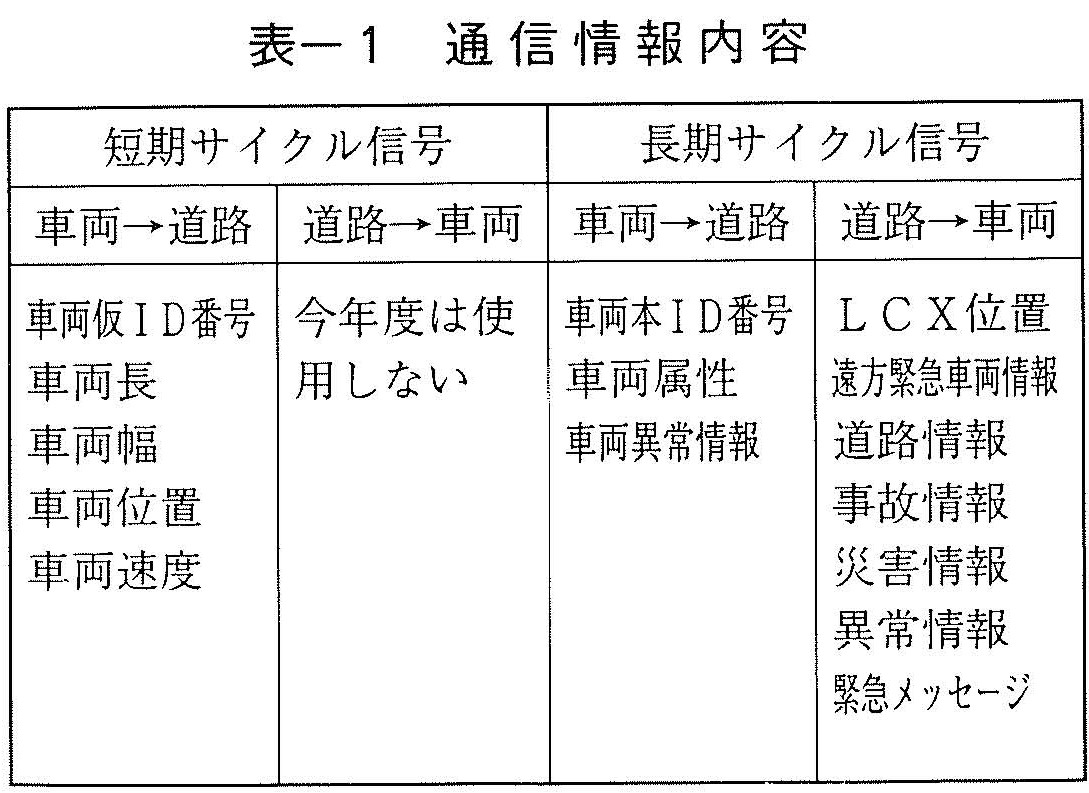
車と道路が双方向通信を行う場合,情報はその情報内容や利用形態によって2つに分類できます。短い周期で連続的に通信しなければならない情報(例えば,車両位置,車両速度)は短期サイクル信号として取り扱います。現時点では短期サイクル信号は0.1秒に1回の間隔で通信を行っておりますが,今後はさらに短い間隔での通偏も検討しております。
それほど短い周期で通信する必要のない情報は長期サイクル信号として取り扱います。長期サイクル信号は1秒程度の通信間隔で通信を行うようにしております。現在通信を行っている情報内容を信号の種類毎に表ー1に示します。
(3)磁気ネイル
自動運転車の縦方向および横方向の制御を行う機器として写真ー1に示す磁気ネイルを1m間隔で車線の中央に埋設しています。この磁気ネイルから発生する磁界パターンを自動運転車の磁気ネイルセンサが検知し,車線横方向の位置を検出するとともに,磁気ネイルがキロポストの役割を持つことによって縦方向の位置の把握に役立てています。
(4)画像情報処理装置
道路上で発生した車両停止(事故等),渋滞,落下物等を画像で検知し,自動判定を行う画像情報処理装置を設置しています。2台のカメラによって約200mの範囲をカバーしており,撮影された実画像は画像処理装置に送信され,様々な現象の自動判定を行います。自動判定された情報は下位情報処理装置に伝達されLCXから車両に提供されます。
(5)AVM(自動車両位置表示装置)
実験を実施するには,各実験車の効率的な運行管理を行う必要があります。そのため,各実験車の位置速度を把握するために自動車両位置表示装置(AVM)を設置しております。 AVM装置は実験車からLCXに送信された情報を加工して,監視棟の大型デイスプレイに各実験車の位置,速度等を表示するものです。
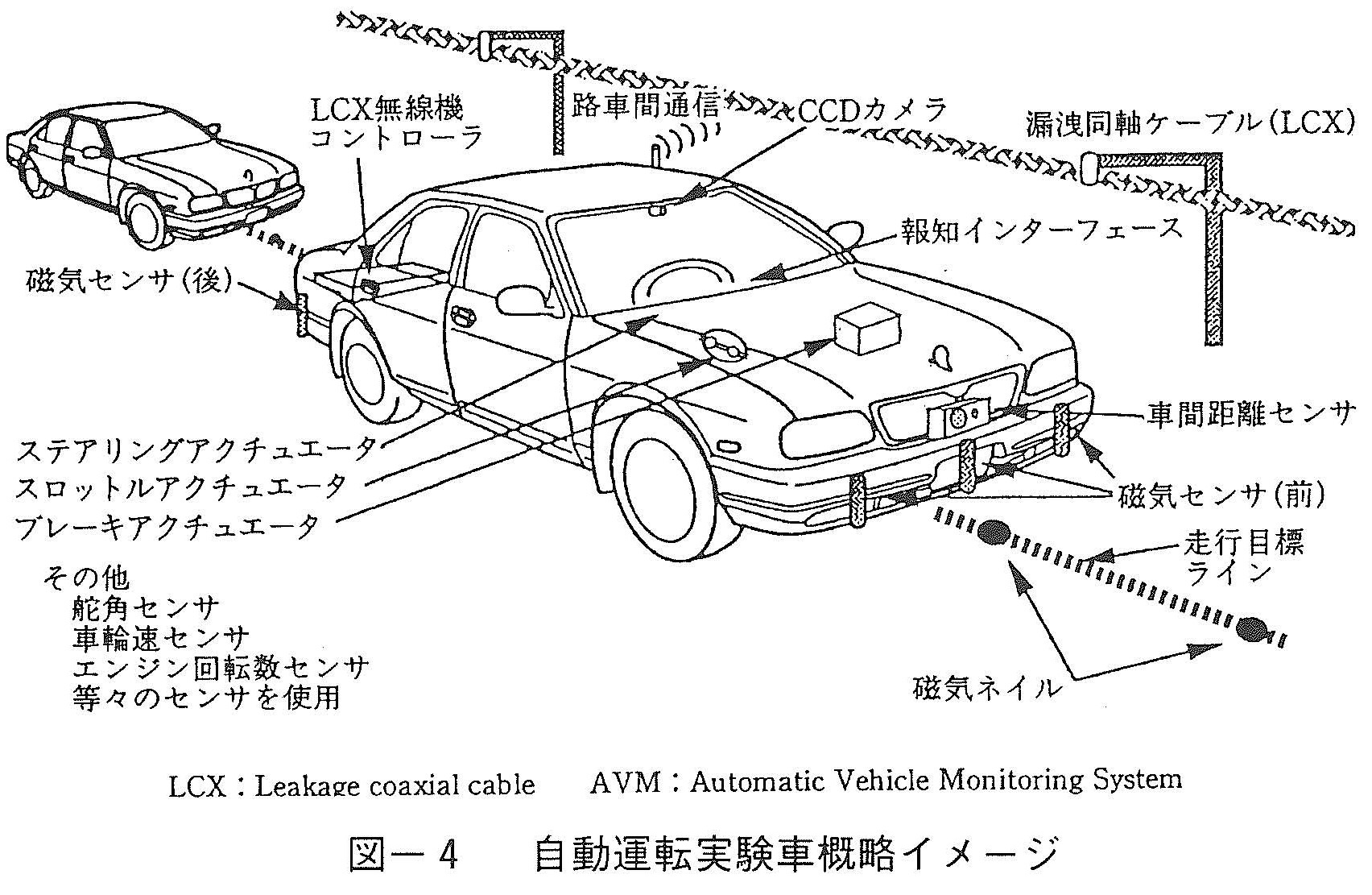
(6)実験車
上記の実験設備を利用した自動運転を行う実験車には,磁気ネイルセンサ,車間距離センサ,CCDカメラ,通信用アンテナ,情報処理装置等を搭載しています。その概略イメージを図ー4に示します。実験車はLCXからの指示速度に基づき,発進・停止を含めた速度制御を行います。また,車間距離センサからの情報に基づいて,車間距離を一定に保つような車間距離制御も行います。車間距離センサとしては,レーザーレーダーや画像認識技術が用いられています。車と車の通信には光通信装置や特定小電力無線が用いられ,速度,距離,アクセル,ブレーキ,ステアリング量などの情報を伝達しています。ステアリングの制御は車車間通信の他,磁気ネイル,路側の白線,LCXからの道路線形情報を組み合わせて行っています。
4 AHS公開実験
土木研究所におけるAHSの実験の開始式として,AHS公開実験を平成7年11月1日に実施いたしました。当日は森建設大臣(当時)の臨席のもと,招待者,プレス関係者等の方々に多数ご参加いただきました。開始式で森建設大臣は平成7年8月下旬にアメリカのデトロイト市において米国自動運転コンソーシアム(NAHSC)が開発中のAHS車に試乗した際の感想を述べられ,「アメリカでは実際のハイウェーで自動運転を経験した。スリルもあり貴重な経験であった。今回は土木研究所のテストコース内の実験だが,実際の道路でも早く走れるよう,関係者一同のさらなる研究開発に期待する。」とのご挨拶をいただきました(写真ー2)。続いて,坂本土木研究所長より経緯説明があり,代表者によるテープカットが行われました(写真ー3)。
その後,公開実験を実施し,その際に試乗会を行いましたが,試乗後の大臣記者会見では「大臣車よりもよい乗り心地であった。」,「人に優しい車である。」との感想をいただきました。
公開実験としては,自動運転基礎実験と前方道路危険警告機能実験の2種類の実験を実施しました。以下に,実験の概要を示します。

(1)自動運転基礎実験
今回の基礎実験は,自動運転の基礎的技術の検証を行うためのプロトタイプシステムを構築したもので,ドライバーがアクセル,ブレーキ,ハンドル操作をせずに,実験車が2~3台の車群を構成して,時速40km~時速60km~時速40kmというようにLCXからの指示により速度を変化させながら自動で走行しました(写真ー4,写真ー5)。
(2)前方道路危険警告機能実験
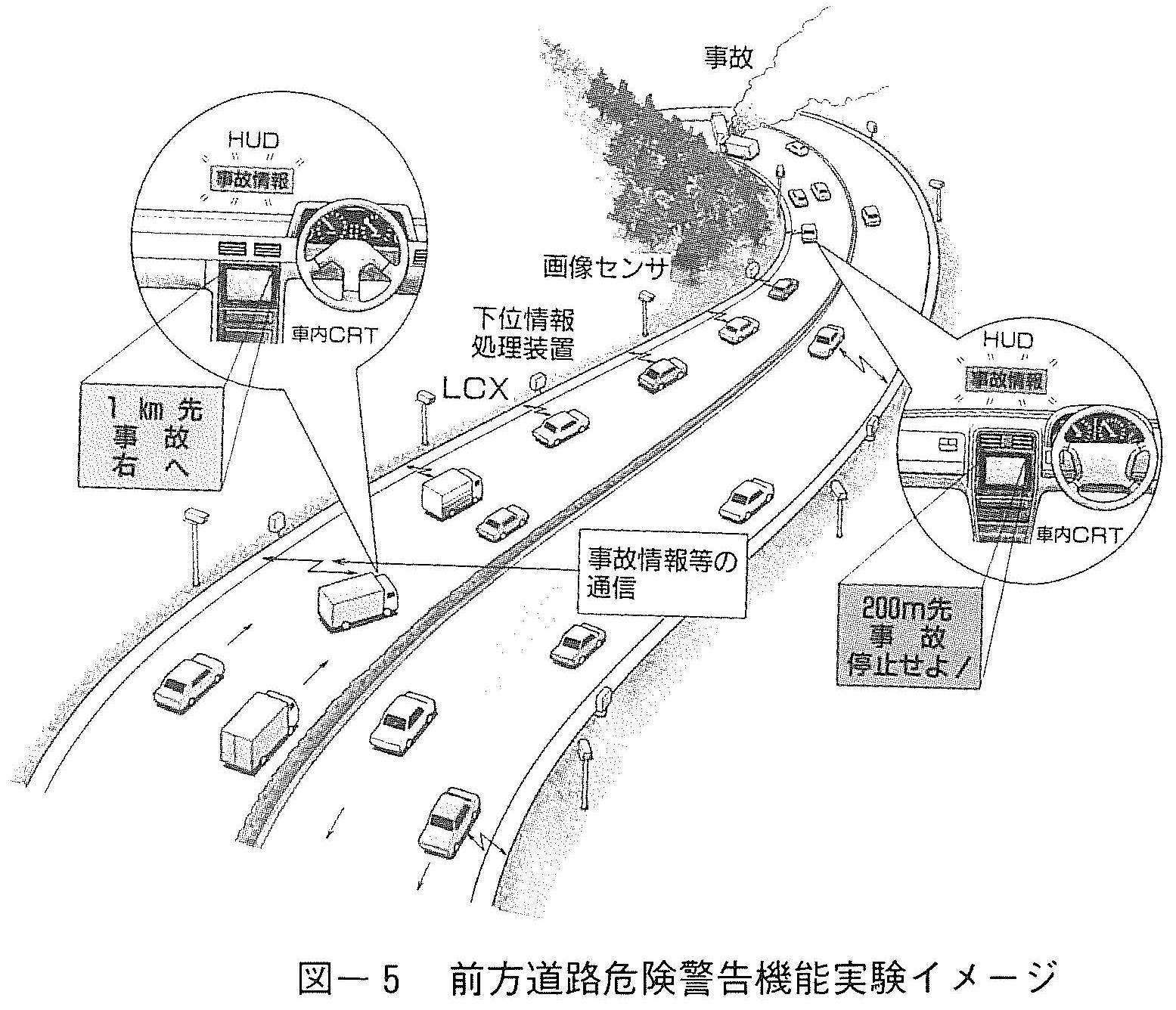
前方道路危険警告機能は,道路上で発生した事故や落下物等の情報を道路側のセンサによって瞬時に自動検知,判定し,LCXを通じて後続車に情報を伝える機能です。この機能により後続車は前方で発生した危険を余裕をもって回避することができ,多重衝突事故等の防止が期待できます。
実験では道路上に設置された画像センサが車両の停止を自動的に判定し,後続の車両に伝え,後続車の車内CRT画面やHUD(ヘッドアップデイスプレイ)等に情報を表示しました。システムイメージ図を図ー5に示します。
5 今後の研究
AHSを実現するためには,まだ多くの技術的課題を解決する必要があります。詳細な内容については今後の検討によりますが,現時点で考えられている項目について以下に示します。
1)車両位置評定技術の精度向上
2)車両制御技術の高度化
3)通信技術の高度化
4)情報提供等に関するヒューマンマシンインターフェース技術の検討
また,実験によるデータ収集及び検証を実施していく必要があり,本年度は実道(未供用高速道路)での実験を予定しております。
また,技術的課題の他に,車両に関する各種法規,電波免許等に関する各種法規等の問題を解決しなければなりません。
今後は以上の点を考慮しながら,夢のシステム/AHSの実現に向けて研究を進めていく予定です。最後に,公開実験では共同研究の相手先である自動車,電気,通信関連の民間企業の多数の方々に大変お世話になりました。誌上をお借りしまして,感謝申しあげます。
