
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせレベル4 自動運転の実現に向けた路車協調システムの実証実験
~狭隘区間における対向車との遭遇回避のためのインフラ支援~
~狭隘区間における対向車との遭遇回避のためのインフラ支援~
国土交通省 九州地方整備局
道路部 道路計画第二課
計画係
道路部 道路計画第二課
計画係
秋 山 太 志
キーワード:自動運転、路車協調システム、実証実験
1.はじめに
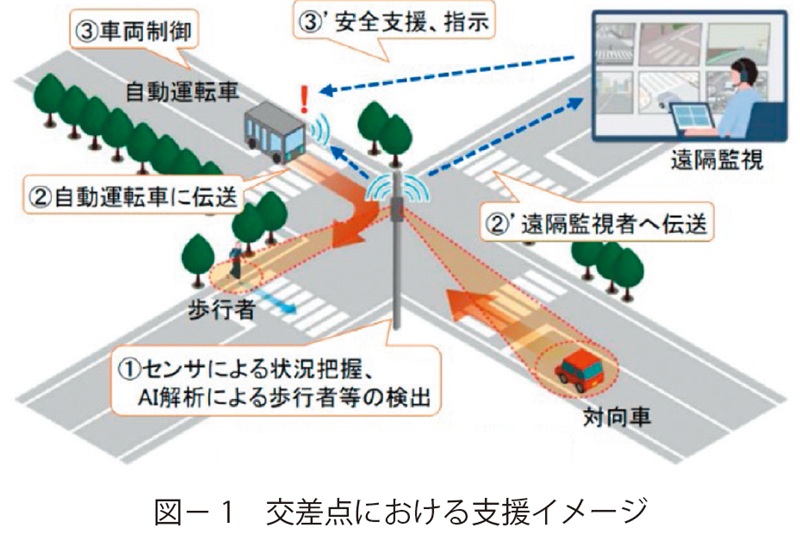
一般車や歩行者等が混在する一般道でのレベル4自動運転移動サービスの実現には、手動介入の発生が想定される箇所で自動運転車両等へ道路状況の情報提供を行うなど、道路側(路側)からの支援が求められている。具体的には、見通しの悪い交差点やすれ違いが困難な道路等で、自動運転車両が安全に走行できるように、道路に設置したカメラやセンサが交通状況をリアルタイムで検知し、その情報を自動運転車両に提供する。これにより、自動運転車両は車載センサだけでは把握しきれない情報を得ることができ、安全な運行が可能となる(図- 1)。
令和5年度に公募があった「路車協調システム及び走行空間の技術的検証を目的とした自動運転実証実験について」で採択された大分県佐伯市と連携し、自動運転支援のための路車協調システム実証実験を実施したので報告する。
2.実証実験計画
(1)佐伯市における自動運転実証実験
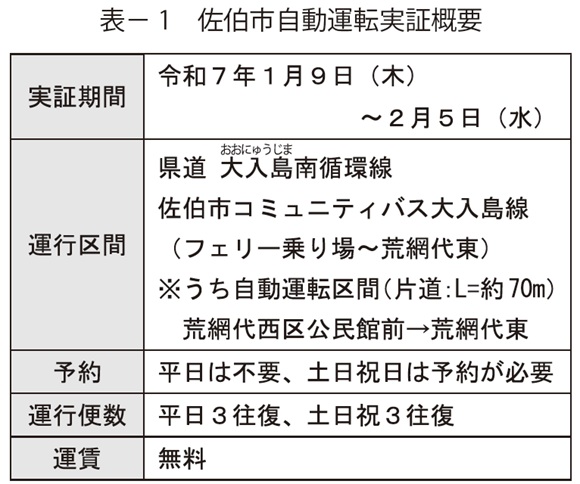
今回の路車協調システムの実証実験は、佐伯市で実施された自動運転実証実験と連携して実施した。当該地域は、コミュニティバス事業において、運転手不足等の将来的な諸課題の解決や自動運転実装に向けた技術検証、住民の理解促進を目的として、自動運転バスの社会実装に向けた実証運行を実施している地域である。実証概要とルートを示す(表- 1、図- 2)。

(2)検知対象及びセンサの設定
本実証実験で路車協調システムが必要となった区間は、車両同士のすれ違いが困難な狭隘区間であった(写真- 1)。

狭隘区間内で自動運転車両と対向車が遭遇する状況を回避するため、道路側(路側)からの支援を検討することが求められた。狭隘区間での遭遇回避にあたっては、対向車の走行速度を踏まえて検知区間を設定することが必要であったため、当該区間の規制速度(40km/h) を考慮し、狭隘区間に進入する約30m手前から検知区間として設定した。
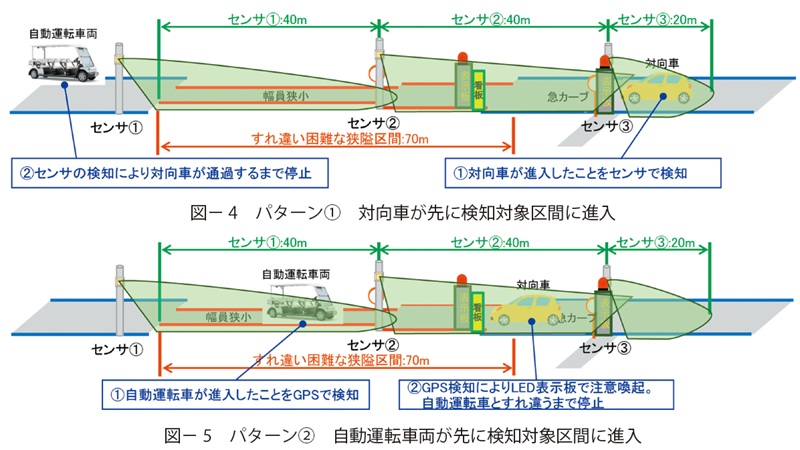
遭遇回避については、
①対向車が先に検知対象区間に進入(対向車を検知し、自動運転車両が一時停止)
②自動運転車両が先に検知対象区間に進入(自動運転車両の位置情報と連動してLED表示板を点灯し、注意喚起、通過後消灯)
の2つのパターンで設定した(図- 4、図- 5)。
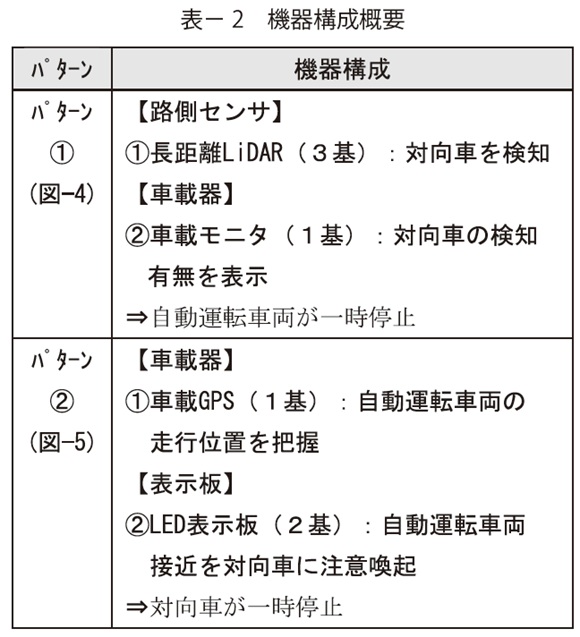
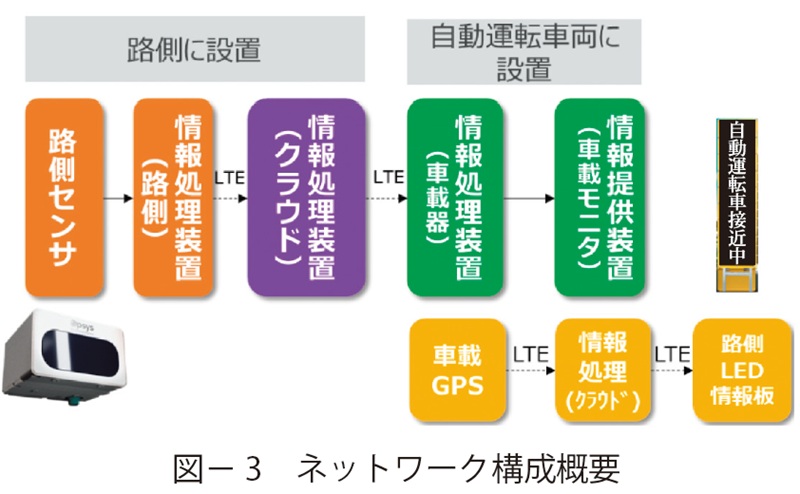
それぞれのパターンを実現するための機器構成を検討し設定した(表- 2、図- 3)。
3.実証実験の実施
(1)センサの設置状況
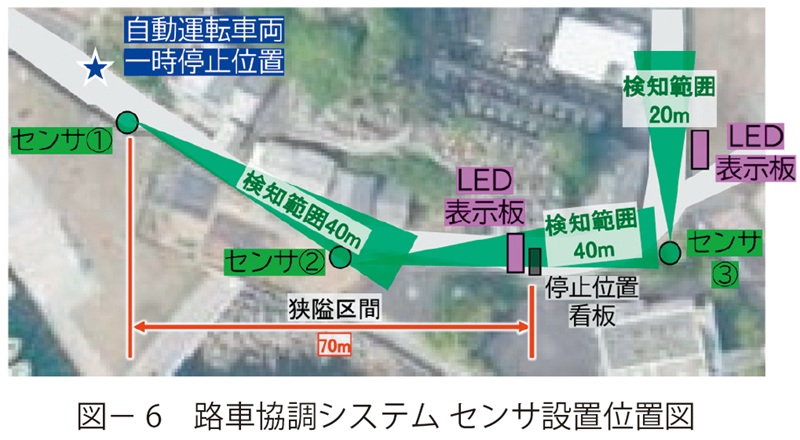
対向車を確実に検知するため、既設柱の位置関係とセンサ性能による検知範囲について、現地踏査の上、設定した(図- 6、図- 7、図- 8)。


(2)実証実験の実施
佐伯市と連携した実証実験として、2025年1月9日~ 2月5日までの計28日間、実証実験を実施した。路車協調システムの有効性を検証することを目的とし、システムを稼働する期間(1月9日~ 1月31日)と、非稼働とした期間(2月1日~ 2月5日)までを区分し実施した。
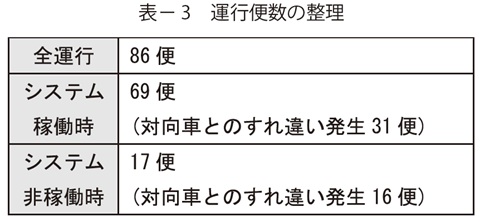
最終的な自動運転車両の運行便数、運行時の対向車とのすれ違い発生件数について示す(表- 3)。
また、検知対象として設定した対向車とのすれ違いやLED表示板の表示状況について取りまとめた(図- 9、図- 10)。


4.検証結果
(1)検知パターンの検証
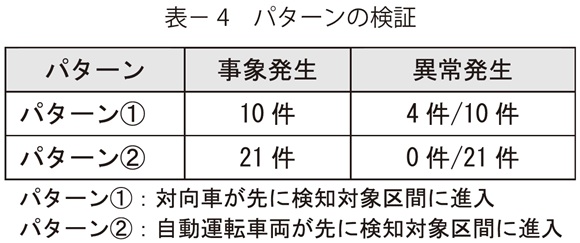
路車協調システム稼働時の69便で対向車が確認された31件を対象に、想定した検知パターンが正常に稼働したかを検証した。
結果として、パターン①において、自動運転車両が検知対象区間に進入する前に、LED表示板が点灯し、自動運転車両と対向車がともに停止するという事象を4件確認した(表- 4)。
要因は、自動運転車両のGPSの測定誤差が影響しており、自動運転車両が所定の一時停止位置で停止しているにもかかわらず、検知対象区間に進入していると判定してしまったことが要因である。
(2)稼働時/ 非稼働時の比較
路車協調システム稼働時/ 非稼働時の検証として、自動運転時の手動介入の発生有無と運転手へのヒアリング調査による定性的な効果を測定した。
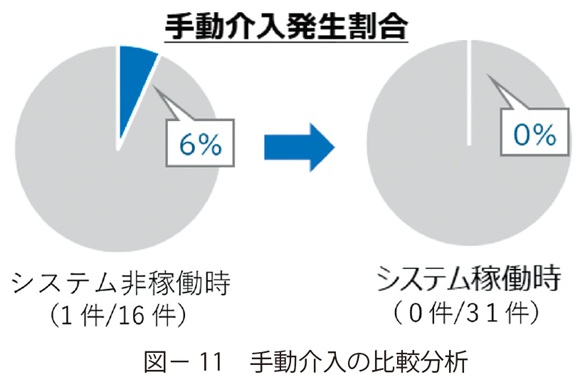
自動運転時の手動介入の有無としては、システム非稼働時に、狭隘区間で対向車が接近したことが原因で1件手動介入が発生した。しかし、システム稼働時は発生しなかったことから、路車協調システムが支援情報として一定程度有効であることが確認できた(図- 11)。
また、実証期間の自動運転車両の運転手へのヒアリング結果より、視認できない情報がわかり有用、との意見が得られた。
(3)今後の課題
今回の実証実験において、GPS車載器の測定誤差に起因し、自動運転車両と対向車がともに停車する事象が確認された。この課題の解決に向けては、GPSの精度向上等、自動運転車両の位置情報の精度を確保するなど技術の向上が必要と考えられる。
5.まとめ
今回の実験により、路車協調システムによる自動運転車両への支援は一定程度有効であることが実証された。しかし、実運用にあたっては、自動運転車両の位置情報の精度確保、今後のセンサ性能向上を見据え両方向に対応した対向車検知センサの効率的配置、自動運転車両との連携・制御を目指し、研究を進める必要がある。
参考文献
1)自動運転実証調査事業と連携した路車協調システム実証実験について
(令和6年3月 国土交通省道路局 https://www.mlit.go.jp/report/press/road01_hh_001792.html)
(令和6年3月 国土交通省道路局 https://www.mlit.go.jp/report/press/road01_hh_001792.html)
2)佐伯市における自動運転実証について
(佐伯市 https://www.city.saiki.oita.jp/kiji0039907/3_9907_up_yp575itp.pdf)
(佐伯市 https://www.city.saiki.oita.jp/kiji0039907/3_9907_up_yp575itp.pdf)
