
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ遠隔操縦機器の映像環境と操作環境
九州大学文学部教授
(心理学教室・文学博士)
(心理学教室・文学博士)
松 永 勝 也
1 はじめに
作業環境を操作者自身が直接目視しながらの遠隔作業としては,マジックハンドによる放射性同位元素の取り扱いやラジオコントロールヘリコプターによる農薬散布などがこれまで試みられている。一方,NASA AMES研究所は,スペースシャトルや宇宙基地など人には危険な場所での作業の無人化を図るべくその基礎研究を活発に行っている。宇宙での作業環境を地上にいる操作者が直視し,作業することは不可能であるので,研究における中心的な関心は,作業環境の画像を遠隔地に伝送・提示し,操作者の制御行動を遠隔地に再び伝送するための装置の開発にあるといっても良い。ただし,これら今までの研究の成果が生かされているのは,ゲームを除けば,仮想現実感技術応用の高速風洞でしかないといえる。
ところで,雲仙・普賢岳の麓で,このような仮想現実感(テレプレゼンス)技術を応用したシステムによる大規模な無人の土砂除去工事が行われている。この工事で採用されたシステムにより実験を行った結果,土砂除去のみならず,ブロック積み上げのような精度が要求されるやや複雑な作業も可能であるとの基礎資料を得た,本工事のためのシステム構築に当たって新しく開発された技術は多い。世界をリードする技術にもなりうると考えられる。今後の展開を期待するものである。
本報告では,現実感をもった映像環境生成のための基本的な知見と技術の基礎について紹介する。
2 視覚的立体感を生み出す要因
遠隔地からロボットを操縦する場合,遠方にいる操作者は何かの手段により作業環境の認識をする必要がある。作業を行う場合には,ほとんどの場合,環境の3次元構造の認識が必要である。3次元構造の認識において問題となるのは,奥行き方向の構造(距離)の認識である。
奥行き方向の距離の認識は次のように行っていると考えられる。網膜は平面とみなすことができる。その平面上の映像から,あるいは視対象を網膜上に適切に結像させる機構から,人は奥行き情報(奥行きの手がかり)を抽出し,それを利用して再び3次元世界を復元する。奥行き構造復元のために利用されている情報としては,両眼視差(理想状態で約200mくらいまで機能するといわれている),運動視差(理想状態で300mくらいまで),輻輳(理想状態で20mくらいまで,実用的には7mくらいまで),調節(理想状態では7mくらいまで,実用的には2mくらいまで),光の当たり方(理想状態で200mくらいまで),物体の網膜上の大きさ(数1000mくらいまで),物体の大小の勾配(肌理の勾配;リニアパースペクティブ:理想状態で500mくらいまで),重なり,上下関係などといえよう。10m以内の距離であれば最も効果的な情報は“両眼視差”と報告されている(Nagata,1991)。
以下両眼視差について述べる。2つの眼の位置が離れている(日本人の瞳孔の中心距離Pは50mm~70mmとされている,平均は約62mm)ことから注視点と距離の異なる物体の像は両眼の対応する位置に投影されず,両眼像にずれが生じる。この両眼の像のずれを両眼視差といい,このずれが奥行き復元の情報の一つとなる。健康な眼での両眼視差の閾値は,大島(1966)によれば,視角にして3.3秒(v.Kries)~15秒(Pulfrich)であるという。
例えば,図ー1に示すように,物点Fを注視している場合(このとき,Fは網膜の中心窩に結像している),物点Aに対する像は,両眼の網膜上の対応する位置には結像しないので,両眼視差を生じ,AはFよりも遠くにあるように知覚される。ここで,物点Fに対する視線(基準)からの物点Aに対する視線のずれδは,(θ1-θ2)で与えられる。すなわち,
となる(大越,1972を参照)。
ところで,人の眼の前額平行面での空間分解能は,測定法によって異なった値が示されているが,一線視力で視角0.5秒(背景30.2mlで,Hect & Mintz,1939;大島,1966に引用)から0.5分までの間の値が示されている(大越,1972)。
3 立体画像提示装置
両眼視差により立体感を得る場合には,左右の目に両眼視差相当のずれを持った映像を与えればよい。両眼視差のみを与えた場合,物体までの距離を10m,人の眼の視差分解能を10秒とすると,分離しうる最小距離は8cmとなる。この精度での作業を期待する場合,ディスプレイの空間分解能を400本とすれば,対象物体の画角を約6分以下としなければならない。もし,HD映像システムを使用すれば,対象の画角を17分まで拡大できる。しかしいずれにしても,この画角では,物体の位置関係を把握することは困難である。この問題を解決するには,複数の映像システムを用意し,大と小の画角での映像を提示するか,ズーム機構を持ったシステムにより,必要に応じて,画角を変える事を考慮する必要があろう。ズーム機構を持ったTVカメラの場合,カメラの上下左右の動きとズーム機構を駆動するシステムを持たせる必要がある。
立体視装置のみでは,奥行き方向の距離認識能力が十分でない場合は,側方から撮像し,その画面を補助的に与えると,さらに作業精度を高めることができる。
4 ディスプレイ上の像の画角,有効分解能の大きさと作業時間の関係
立体視のための映像装置としては,ディスプレイの画角が大きく,分解能の高い方が奥行き方向の空間分解能は大きくなり,作業はやりやすく,作業時間は短くなると考えられる。
ディスプレイ上の像の画角,有効分解能の大きさの違いと作業時間の関係を調べるために以下のような実験を行った。被験者には,立体TVの映像を見ながらロボットを操作して,与えられている4個のブロックのうちの任意の1個をつかみ,缶の上部まで移動させ,缶の中に落とし込む作業を課した。
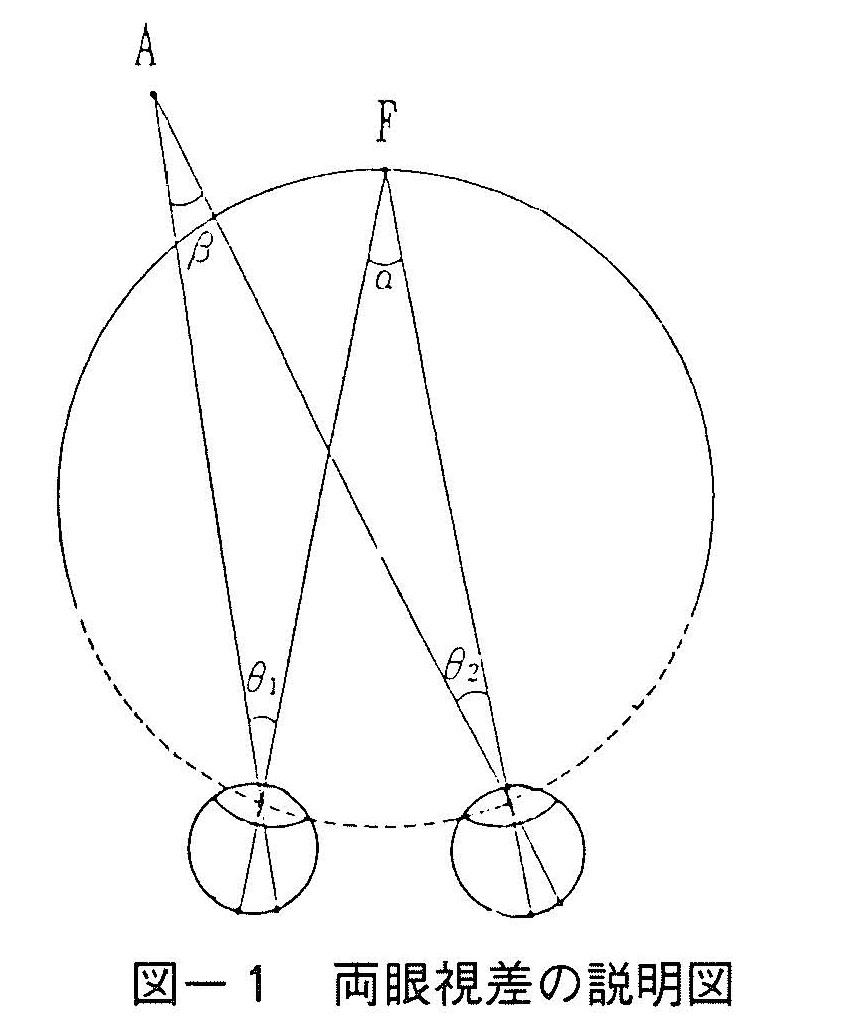
実験の結果を図ー2に示す,ディスプレイの画角が大きい方(条件2)が,小さい方(条件1,3,4)よりも作業時間が短くなった。ディスプレイが小画角かつ低分解能の場合(条件4)に最も作業時間が長くなった。
これらのことから,対象の占める画角と有効分解能の大きい方が,作業時間は短縮するといえる。ただし,本研究では,どの程度の画角と有効分解能にすれば要求水準に達するかについては明らかにしていない。これは今後の課題である。
5 頭部運動と同調した画像の動きの効果
われわれが日常,作業を行う場合には頭部は自由に動かせるのが普通であり,頭部を動かしながら必要な情報を取り込んでいるとも考えられる。
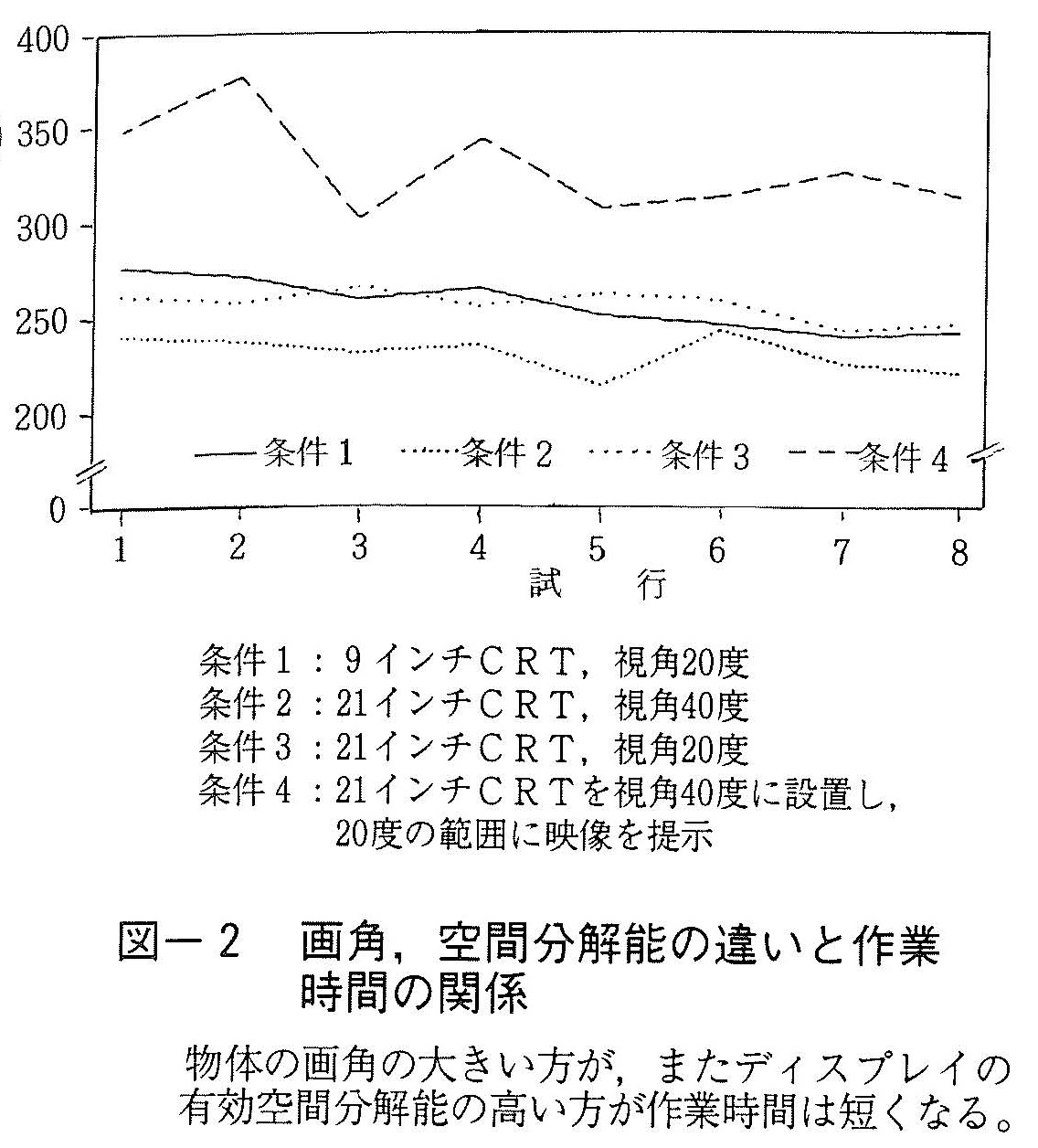
図ー3は,2台のTVカメラと,ディスプレイをヘルメットに搭載し,それを装着した被験者の頭部を動かせる状況と動かせない状況での作業時間を示したものである。被験者の作業は,ヘルメットに搭載されているディスプレイの画像を見ながら,ロボットを操作して5個のブロックの内の任意の1個をつかみ,缶の上部まで移動させ,缶の中に落とし込むことであった。図から,両眼・頭部可動視条件においての作業時間が最も短くなっていることが分かる。単眼視でも頭部可動条件での作業時間が両眼・頭部固定視条件での作業時間よりも有意に短くなっている(p<0.01)。単眼・頭部固定視条件と両眼・頭部固定視条件での作業時間の間には有意な差は認められない。
6 側方画面の効果
ラジオコントロール可能なバックホウによる作業時間を測定することによって,人の画像からの3次元構造復元特性について検討した。
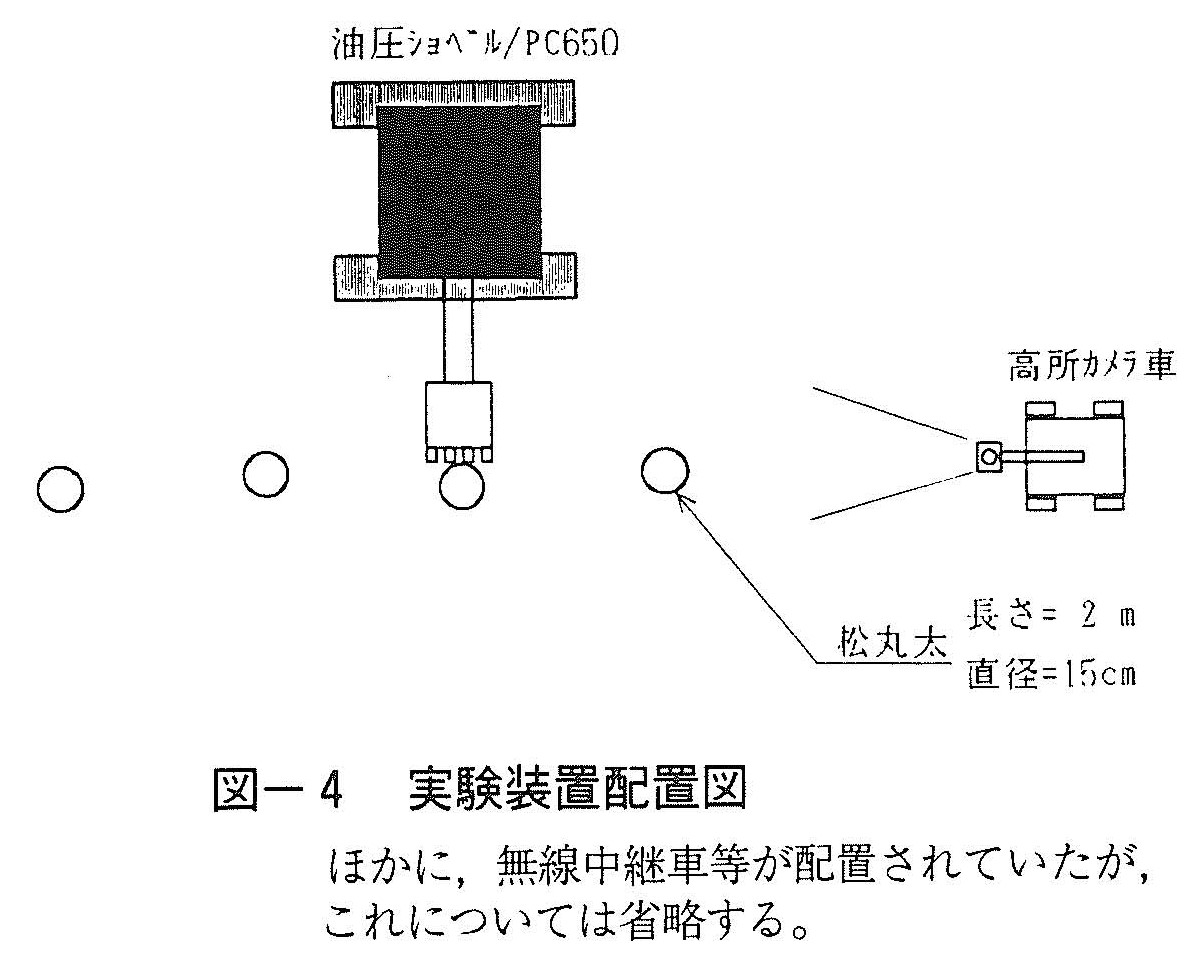
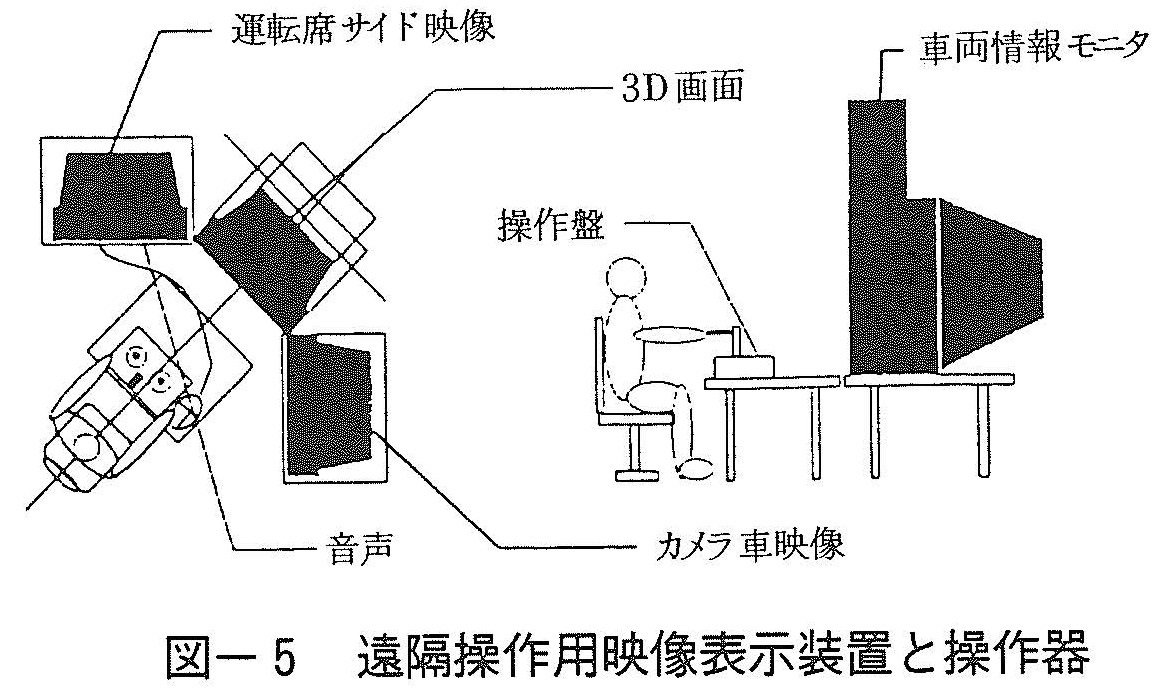
バックホウの操作者には,高さ137cm~158cm,間隔が約4m~5mとなるように立てた直径約15cmの木製杭の上端にバックホウの中央の爪を,1番目から4番目の杭まで順に接触させる作業をさせ(図ー4,5),この間の時間を測定した。被験者は熟練者と初心者それぞれ1名であった。
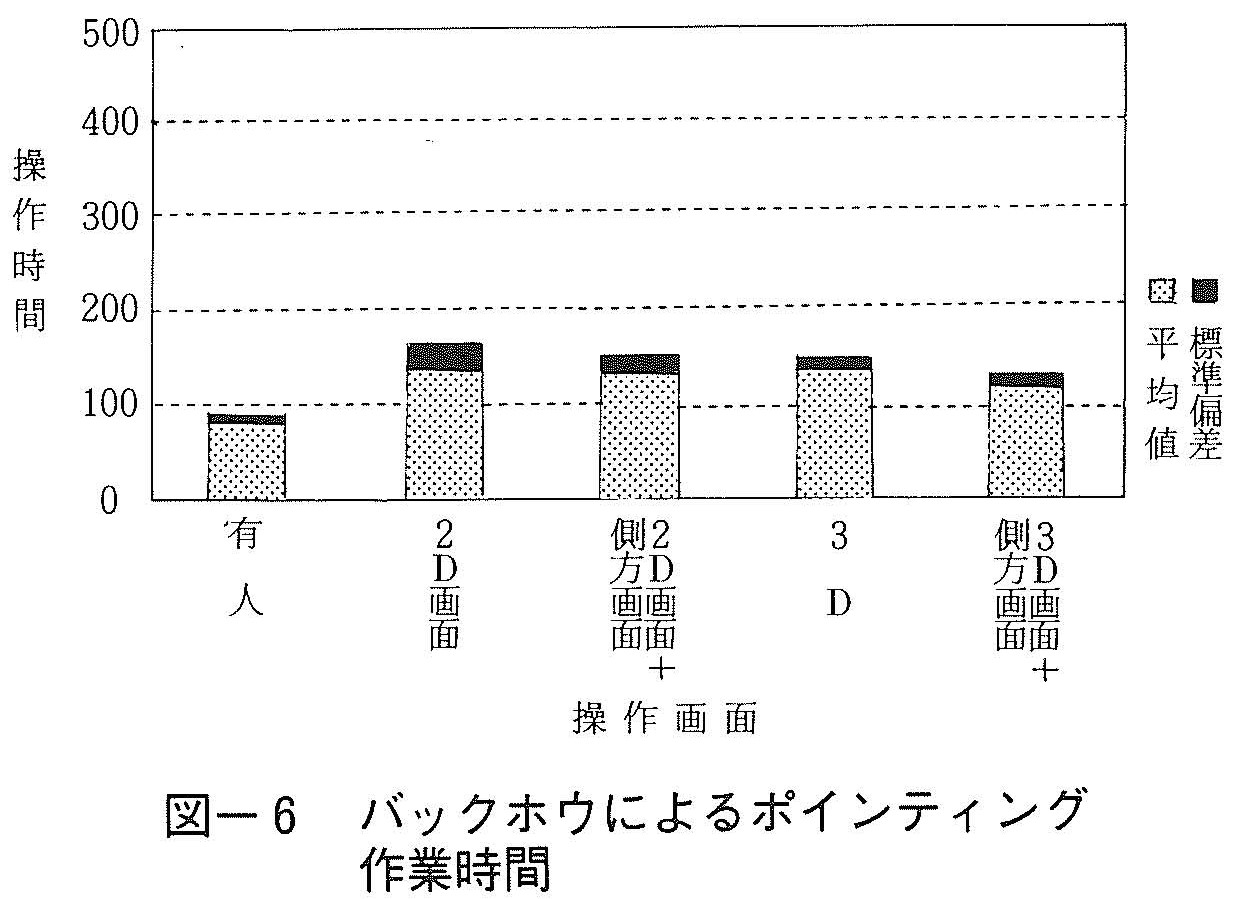
実験の結果,特に遠隔操縦の場合は,作業を繰り返すに従って作業時間の短縮が認められ,直視操作における作業時間に接近した。図ー6に熟練者の各条件での作業時間を示す。図から分かるように,作業時間は直接視・直接操作によるものが最も短い。遠隔操作の場合には,立体画像に側方からの画像を加えたものによる作業時間が直接視作業時間の約1.4倍となり,立体画像のみによる場合よりも短くなっている。立体画像では十分ではない奥行き方向の分解能に側方からの画像を補うことによって,作業時間が短縮されたものと考えられる。
土砂積み込み作業のように,それほど精度を要求されない作業においては,直接視・直接操作(有人)による作業の場合の作業時間と遠隔操作による(無人)作業時間の間に差はないといえる。

7 積み上げ・解体作業でのシステム評価
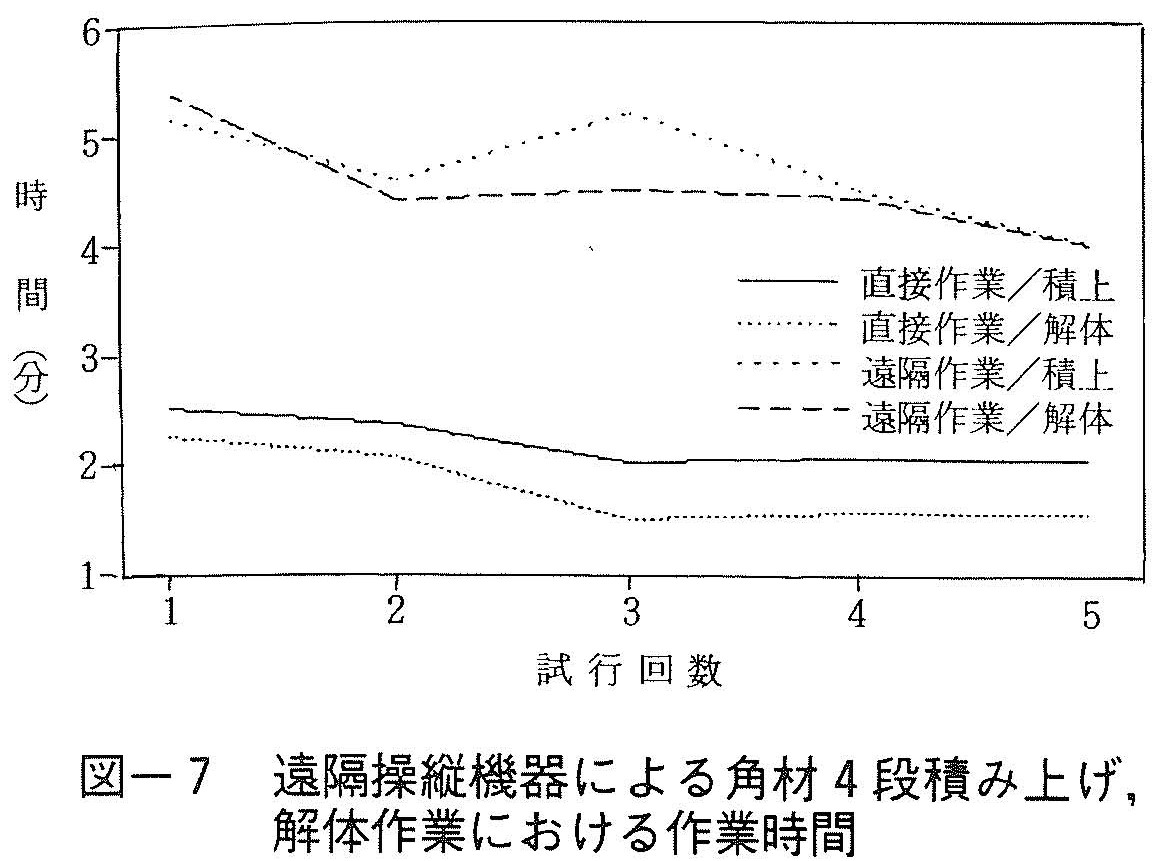
遠隔操縦可能な破砕機に切断用アタッチメントを付け,それで木材(30cm角,長さ1.18m)をつかみ上げ,4段に積み上げ,再び解体する作業を被験者に課した。
図ー7に,作業時間を示す。側方画面付き立体画像下の遠隔作業の時間が,直接視下の作業時間の約3倍となり,バックホウによるポインティング作業の時間に比べ,作業効率が大幅に低下した。作業時間が延長したのは,課題の困難さが大となったために,3次元情報の少なさがより影響を及ぼしたとも考えられるが,一方では,直接操縦の場合の操作器(駆動レバーとペダルのシステム)と遠隔操縦の場合の操作器が同一ではなく,これが大きく映像環境下の作業時間を低下させたものとも考えられる。
他の理由として以下のことも考えられる。切断用アタッチメントで木材を掴ませたために,強く掴むと木材に損傷を与えるが,直接作業の場合は,音で掴む強さを判断できた。しかし,遠隔作業の場合には,音の伝送を行わなかったため,時間をかけて緩やかに操作せざるを得なかった。このことも作業時間を長くしたと考えられる。これは,触覚センサーやマイクロフォン付きのアタッチメントにより解決できるであろう。
8 カメラ移動条件または固定条件での画像提示下における歩行操作またはマウス操作と作業効率
人間は動物であり,生存するためには動き回る必要がある。従って,動き回りながら,環境の認識を行い,必要な物の獲得を行っていると考えられる。このような日常の生活において形成された人の情報処理・行動プログラムは,仮想環境下でもその効果が発現するものと考えられる。
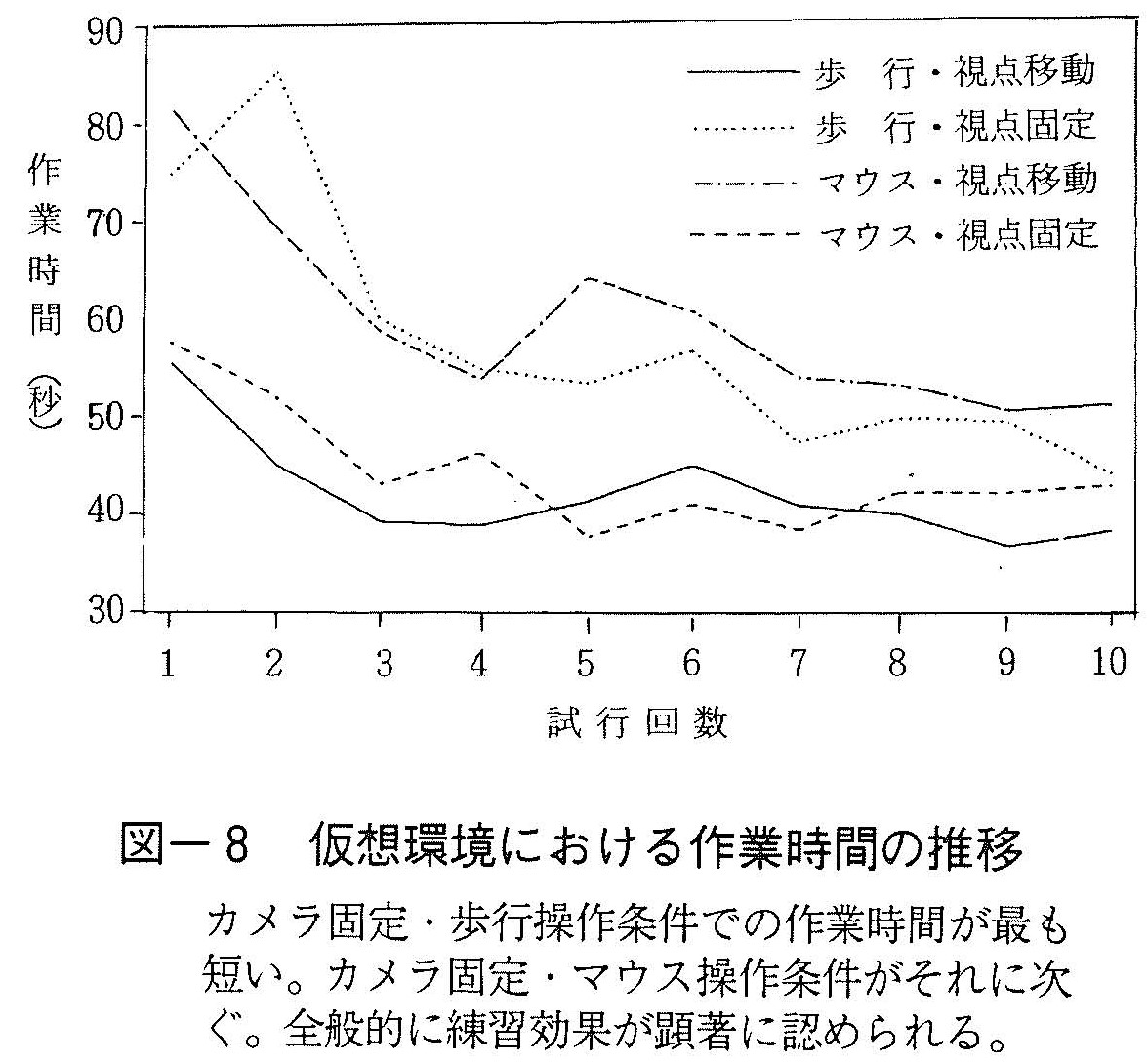
図ー8に,被験者(オペレーター)と共にカメラも移動する場合,あるいはカメラは一定の場所に固定し,被験者のみが移動する条件において,被験者の歩行運動によってクレーンを移動させる操作条件,あるいはマウスによる操作条件での作業時間を示した。全条件において,試行を繰り返すに従って作業時間は短くなり,3回目の試行では初回での作業時間の約70%くらいまでになった。それ以降は緩やかに短縮している。
本実験において,カメラ移動条件で,かつ歩行操作での場合において最も作業時間が短くなった。また,歩行操作条件においてはカメラ移動での方が,マウス操作条件においてはカメラ固定での方が作業時間が有意に短いといえる。一方,カメラ移動条件の場合にはマウスによる操作で,カメラ固定条件の場合には歩行による操作において作業時間,移動量ともに増大し,著しい成績の低下が生じた,画像の視点(カメラ位置)と自己の運動とが一致している場合の作業が最も容易で,不一致の場合には不自然さを感じたと,披験者は実験後の感想を記している。
本実験の結果から,作業者自身の視点の運動条件と提示される画像の視点の運動条件が一致していることも作業効率を高める一要因といえよう。すなわち,我々が日常体験している視覚と運動の協応状況において最も作業効率が高くなるといえよう。もっとも,日常生活では体験しない条件であっても,十分な体験(練習)が許されれば,また違った結果が生じる可能性もある。しかし,この場合でも練習を常に続けていく必要があると考えられるので,日常生活の中で維持される条件の方がより優位と考えられる。
9 まとめ
遠隔操作において操作者に与える視覚情報と操作環境について,以下のようなことが明らかとなった。
1)ディスプレイの画角および空間分解能は大きい方が作業時間が短い。
2)簡単な課題であれば,単眼視の場合でも試行を繰り返す内に(練習によって)作業時間が短くなり,両眼視条件での成績に接近する傾向が認められる。これは,作業を繰り返すなかで,網膜像の大きさなどを奥行きの手がかりとして利用できるようになることや,指や腕の運動量などが学習されるためと考えられる。
3)操作者が頭を動かすと,それに応じて映像環境の視点を変化させうる場合の方が,作業時間は短く,誤数も少なくなる。これは,ディスプレイの大きさや空間分解能の不十分さによる不足分を,視点を変化させることによって得られる情報で補っていることによると考えられる。
4)立体画面に側方画面を追加した条件での作業時間は立体視画面のみでの作業時間よりも短い,立体画面のみでは不十分な奥行き方向の分解能を側方画面が補っていると考えられる。
5)カメラ移動条件では歩行による操作の方が,カメラ固定条件ではマウスによる操作の方が,操作時間が短くなる。一方,カメラ移動条件の場合にはマウスによる操作で,カメラ固定条件の場合には歩行による操作において,作業時間,移動量ともに増大し,著しい成績の低下が生じる。被験者の記述報告でも,画像の視点(カメラ位置)の移動と自己移動の不一致が不自然さを感じさせると指摘している。
6)実際の工事でなされたバックホウによる土砂のダンプヘの積み上げにおいては,直視・直接(有人)操作による作業の時間と遠隔(無人)操縦による作業の時間に差は認められなかった。
7)実用システムにおいて,ある程度精度を要求される課題でも作業可能であった。ただし,遠隔操作による作業時間は直視作業に比較して約1.4倍から3倍ほど長くなった。
しかし,視覚情報提示装置や操作装置の改良,および操作者の経験の蓄積によって差は小さくなると考えられる。
8)仮想現実感技術を応用した遠隔操縦ロボット(テレロボット)システムによる土木作業は,恐らくこれまで他で試みられたことはないと考えられる。今後も地道に研究開発を進め,人間性回復のために,また,世界に貢献できる日本の技術として育てて行くことが期待されよう。
参考文献
1)原田直子:仮想空間内における作業特性の研究。九州大学文学部心理学講座卒業論文,(1995)
2)松永勝也:空間知覚における運動協応。原島博・広瀬通孝・下条信輔 編,仮想現実学への序曲(副題 バーチャルリアリティードリーム),bit 8月号別冊,共立出版,Pp57-64,(1994)
3)松永勝也,伊藤裕之,築田都,坂本博明:単眼情報下および両眼情報下の作業における頭部運動の効果。3D映像Vol.6,No.1,Pp11-19,(1992)
4)松永勝也,北村文昭,柳田多聞,武藤郁和,織田潤里,下川月子:仮想空間の構築に関する基礎的研究。文部省科学研究費補助金重点領域研究 平成4年度成果報告書「感性情報の処理の情報学・心理学的研究」,領域代表者 辻三郎,Pp160-163,(1993)
5)松永勝也,柳田多聞,柴山陽子,二瀬由里,行場次朗:仮想空間における感性一一。映像空間における作業効率への自己運動の影響一一文部省科学研究補助金重点領域研究 平成5年度成果報告書「感性情報の処理の情報学・心理学的研究」,領域代表者 辻三郎 Pp151-154,(1995)
6)Nagata,S.:How to reinforce perception of depth in single two-dimensional pictures.Ellis,S.ed,Pictorial communication in virtual and real environments,Taylor & Francis,pp527-545,(1991)
7)大越孝敬:3次元画像工学。産業図書,1972
8)大島祐之:視力。眼の生理学 第3章,医学書院,Pp47-77,(1966)
9)Stark,L.,et al.,:Telerobotics:Problems and Research Needs.IEEE Transactions on Aerospace and Electronic Systems,Vol.24,No.5,Pp542-551,(1988)
