
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせレベル4自動運転の実現に向けた
路車協調システムの実証実験について
路車協調システムの実証実験について
国土交通省 九州地方整備局
道路部 道路計画第二課
課長補佐
道路部 道路計画第二課
課長補佐
荒 木 和 政
キーワード:自動運転、路車協調システム、実証実験
1.はじめに
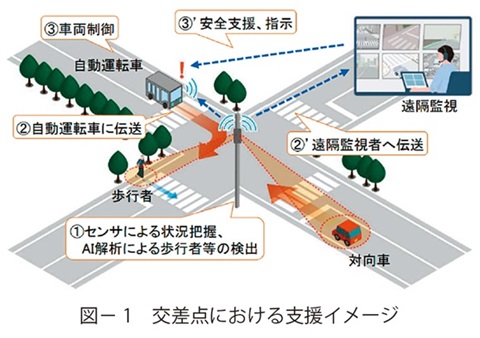
一般車や歩行者等が混在する一般道でのレベル4自動運転(※)移動サービスの実現には、交差点等において車載センサ単独では捉えることが難しい交通状況(死角となる周辺他車の挙動や歩行者の有無・挙動等)を検知し、自動運転車へ提供する道路側(路側)からの支援が必要である(図-1)。しかし、路側に設置するセンサについては、技術基準や求められる機能、仕様等について定まっていないのが現状である。そこで、レベル4自動運転移動サービスの実現に向け、将来的な交通基盤整備を見据え、自動運転車を含む新モビリティを安全に走行させるために必要な路車協調システムの実証実験を実施したので報告する。
( ※レベル4自動運転:
特定の走行環境条件を満たす限定された領域において、自動運行装置が運転操作の全部を代替する状態。)
特定の走行環境条件を満たす限定された領域において、自動運行装置が運転操作の全部を代替する状態。)
2.実験内容
(1)事前準備
今回の路車協調システムの実証実験は、先進的なまちづくり「Fukuoka Smart East」の一環として、自動運転バスの社会実装を目指しているFUKUOKA Smart EAST モビリティ推進コンソーシアム(福岡市、九州大学、UR都市機構、福岡地域戦略推進協議会)(以下、FSE モビコン)が行っているJR 箱崎駅周辺エリアでの自動運転バス運行の実証実験と連携して、実施した。
まずは、路車協調システムの実証実験を行う場所を選定するため、FSE モビコンが行う自動運転車運行ルート(図-2)において、車載センサ単独での検知が難しい箇所が無いか現地踏査を行い、10箇所の候補を選定した。その中でも、実験条件、検知目的に合致し、過去に人対車両の事故が発生している箇所であり、さらに自動車単独での検知が難しい箇所でもある図-2の運行ルートの⑤付近の交差点で、実験を行うことに決定した。

(2)検知対象の設定
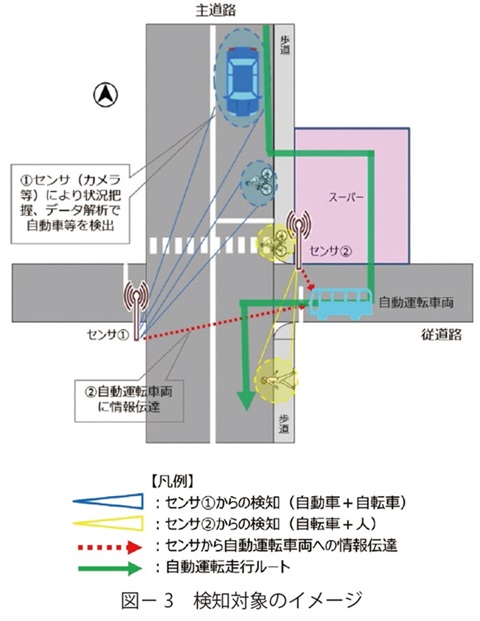
今回の実証実験において、検知を行う自動運転車両の走行ルートは、信号なしの交差点であり、従道路から左折して主道路に進入するものとなっている。交差点部のスーパー側に死角があり、車載センサ単独での検知が難しいものとなっていた。その現地条件を踏まえ、「従道路から主道路へ左折する際の歩道における歩行者、自転車」、「同じく、左折する際の主道路上の自動車及び自転車」を検知対象として設定した(図-3)。
(3)センサ機器の選定
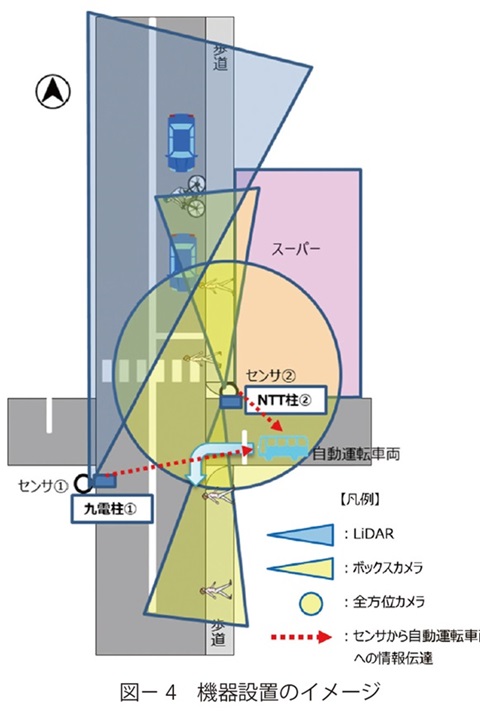
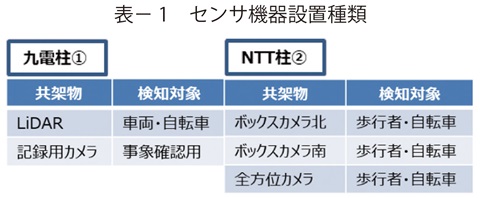
次に、選定した交差点に必要な具体的なセンサの種類、センサの設置箇所の選定を行った。実験箇所の道路特性(死角)、交通特性(自動車、自転車、歩行者が多い等)を踏まえ、検知対象を選定し、検知対象を漏れなく検知できる場所にセンサを設置する必要がある。調整の結果、交差点に既存で設置してある九電柱とNTT柱の2本にセンサを設置することを決定した(図-4)。検知対象を漏れなく検知するために、九電柱とNTT柱、それぞれに設置する機器は(表- 1)のとおりとした。実際に現地に設置した状況を(写真-1)に示す。

(4)検知範囲の検討
検知範囲を設定する上で、まず検知時間を設定する必要があった。
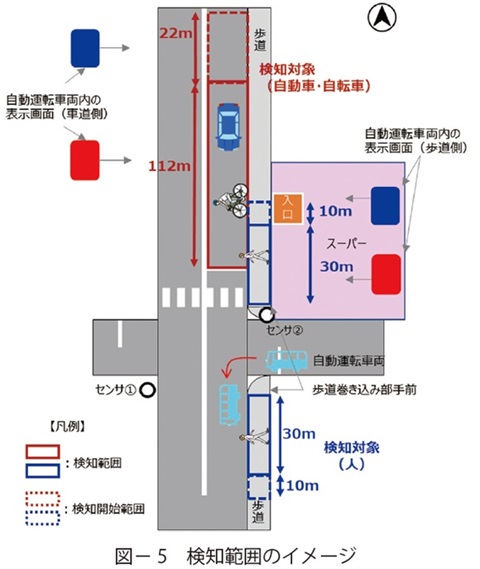
検知時間は、自動運転車両が従道路の停止線から主道路に左折が完了するまでの時間とし、自動運転のオペレーターへのヒアリングから、10秒が妥当であると判断した。その検知時間の間に、交差点に到達し得る自動車、自転車、歩行者がいる範囲を検知範囲と設定した。それぞれの検知対象物の速度から、検知範囲は、車道が約112m、歩道が約30mとなった。検知開始時間としては、対象物が検知範囲に侵入する手前の2秒間とし、車道が約22m、歩道が約10mと設定した。
自動運転車両に検知情報を伝達する手段としては、車内にスマートフォンを設置し、その画面に情報を表示する仕様とし、通信方法として、4G/LTE回線とITSコネクトを使用して、それぞれの比較検証を行った(図-5)。
(5)実証実験の実施
今回の路車協調システムの実証実験は、FSE モビコンが行う自動運転バス運行の実証実験と連携するため、実験期間は令和6年2月17日~3月3日(計16日間)10:00~17:00(計96 運行)にて行った。
実験を実施するにあたって、自動運転車両内における検知情報の表示スマートフォン及び、通信情報受信部等の機器設置状況を(写真-2)に示す。設置する機器・スマートフォンがオペレーターの視界を妨げることがないようにする必要があった。検知対象物をセンサで検知した際のスマートフォンの表示画面は、画面を半分に、左画面が歩道、右画面が車道の検知情報を示し、青・緑は運行可能、赤は停止を示す。(写真-3)のような交差点状況の場合、検知範囲内に自動車が進入しているため、スマートフォン画面は赤表示となる。


3.実験の結果
検知情報を自動運転車両に伝達する方法について、実験結果を以下に示す。
精度としては、実際に検知範囲に対象物が侵入した際に、それをセンサで検知できた検知率は、ほぼ100%であった。一方で、LiDARは電線等が原因で検知範囲が10m程度、短くなったことも確認された。
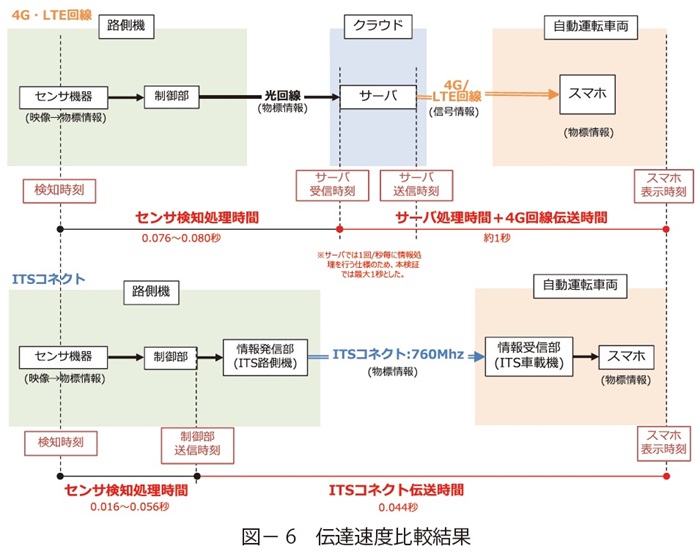
伝達速度としては、センサが対象物を検知してから、その情報を制御部、サーバ又は通信機器を経由して、自動運転車両内のスマートフォンへ伝達するまでの時間にて確認した。その結果、4G/LTE回線を使用した場合は最大で約1.08秒、ITSコネクトの場合は最大で約0.10秒とそれぞれの通信方法にて、比較すると約10倍の差が生じることが確認できた。差は生じたが、どちらも自動運転車両への支援情報として問題ないことが確認できた(図-6)。
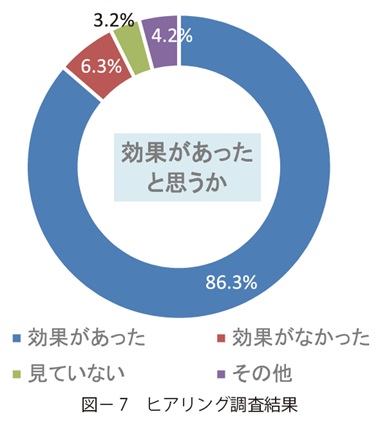
有効性としては、自動運転車のオペレーターに路側からの支援情報として効果があったと思うかのヒアリング調査を行った。結果として、86.3%が効果があったと回答し、支援情報としては有効性が高いことを確認できた(図-7)。
4.まとめ
今回の実験により、路車協調システムによる自動運転車への支援は有効であることが実証された。しかし、実運用に当たっては、電柱がない場所においてもセンサ機器を簡便に設置できる運用やセンサの検知情報を、今後はオペレーターが確認する支援情報ではなく、自動運転車両への制御としての運用を目指し、引き続き、研究を進める必要がある。
最後に本実証実験に携わったパシフィックコンサルタンツ、日本工営におかれましてはこの場をお借りして感謝申し上げます。
参考文献
1)自動運転実証調査事業と連携した路車協調システム実証実験公募要領(令和5年5月国土交通省道路局)
2)FUKUOKA Smart EAST モビリティ推進コンソーシアム自動運転バス運行の実証実験(第2 弾)を実施します。(2024年2月8日https://fse-mobility.jp/news/861)
