
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ自律施工技術の推進に向けた取り組み
国立研究開発法人 土木研究所
技術推進本部
上席研究員(特命事項担当)
技術推進本部
上席研究員(特命事項担当)
山 口 崇
キーワード:自律施工、協調領域、共通制御信号、技術基盤、プラットフォーム、OPERA
1.はじめに
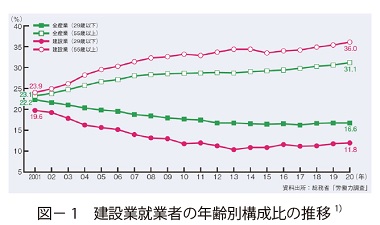
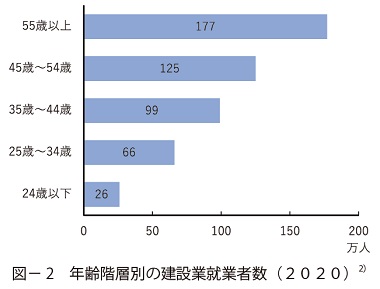
国内の少子高齢化の進展に伴い他産業とくらべ高齢化が進んでいる建設分野においては、今後、深刻な人手不足が発生することが懸念されている。建設業ハンドブック20211)によると、建設業就業者における55 歳以上の割合は、2001年は23.9% であったのに対し2020年は36.0%と12.1% 上昇しており、一方で29 歳以下の割合は、2000年は19.6% であったのに対し2020年は11.8% とこちらは7.8% 低下している(図-1)。また、2020年の年齢階層別の建設業就業者数2)は、55 歳以上の階層に属する就業者数が最も多く、年齢階層が低下する毎に少なくなる逆ピラミッド型となっており(図- 2)、近い将来に100 万人以上の熟練技能者が一挙にリタイヤしていくことが推測される。
このような中、国内の経済と安全・安心な暮らしを支える社会資本の整備や維持管理などを担う建設業において、必要となる生産力を将来にわたり維持していくためには、建設現場の生産性を向上し、また魅力ある産業として将来の担い手を確保していく必要がある。そのため、i-Construction をはじめとした建設現場の生産性向上や働き方の改革を目指した取り組みが進められている。その中で、自律施工は、大幅な省力化と作業環境の改善による新しい働き方の実現が期待できる技術であり、将来の建設現場の基盤となる技術である。
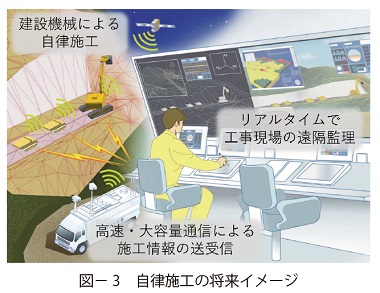
自律施工では、建設機械が周辺環境などを計測して把握し、前もって与えられた指示に従って、自ら判断して作業を行い、人は遠隔地から一人で複数の建設機械の作業状況などを把握しながら施工を進めることを想定している。最終的には「建設現場に必要な人員が最低限または無人となり、遠隔地などからの指令だけで施工が自律して行われる状態」が将来的な目標となる(図- 3)。
現状、民間企業等でダム工事などの限定された一部の建設現場に適用されている自律施工技術の研究・開発を加速し、革新的な自律施工技術を社会実装していくことを目的に、土木研究所(以下、土研という)では取り組みを進めている。本稿では、土研の先端技術チームで行っている自律施工技術の推進に向けた取り組みを紹介する。
2.土研の取り組み3)4)
(1)自律施工技術の推進に向けた課題
令和2年3月に(一社)日本建設業連合会から「建設業のためのロボットに関する調査報告書」5)が公表された。この報告書では、「建設業界へのロボット実用化に向けた課題」をまとめている。これらの課題は、ロボット技術を用いて自律化・自動化・遠隔化を行う施工技術全般を研究・開発し、社会実装していく上でも共通の課題となるものであり、要約すると以下となる。
1)多種多様な建設現場環境や作業内容に対応できる柔軟な建設ロボットの開発
多種多様な建設現場環境や作業内容でも利用可能な作業性を有した、全天候型ロボット技術の確立が求められている。
2)自動化を念頭においた法令・規制の整備
産業用ロボットを参考に、建設業界においても人間とロボットの協働に向けた法整備を進めていく必要がある。
3)協調領域の明確化と技術の標準化による研究開発体制の整備、それによる開発コスト削減
建設業では、個々の会社による技術開発が目立つため、研究の重複が起こっており費用対効果を得ることが難しくなっている。協調領域を明確にして、同業者による共同研究を含めた産学官連携による技術開発体制を整備し、技術の標準化・共通化による開発・運用コストの削減の必要がある。
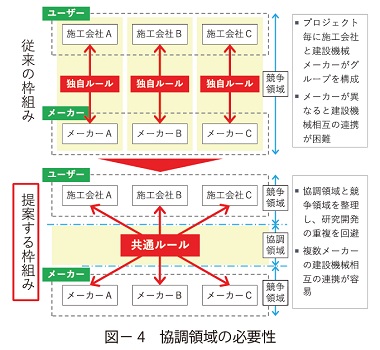
土研では、上記の3)を図- 4 のように理解している。概説すると、従来の枠組みでは、民間企業が自律施工技術の開発を進める場合、多くのケースで施工会社と建設機械メーカーが個別に開発グループを形成することになる。このような開発グループが複数存在し、秘密保持などの制約のために、互いに連携・協働することが困難となっており、研究開発投資の重複が起こっている。また、メーカーが異なると建設機械の相互連携が難しく、特定のメーカーの建設機械しか使えない自律施工技術となりがちである。そこで、協調領域を設定することで、研究開発投資の重複を回避し、複数のメーカーの建設機械を相互に連携して使える自律施工技術の実現が必要である。
(2)取り組みの内容
土研が行っている自律施工技術の研究・開発を加速する取り組み内容を整理すると以下となる。
①協調領域の設定6)
②自律施工技術基盤の整備6)
③安全ガイドライン・監督検査方法の提案
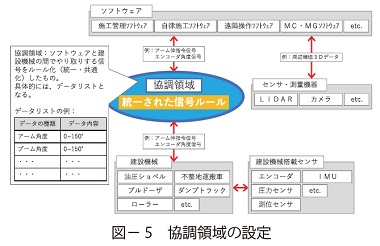
①協調領域の設定は、図- 5 に示すように、自律施工等のソフトウェアと建設機械との間でやり取りする信号の統一化されたルールを協調領域として設定することを考えている。まずは、油圧ショベルの協調領域原案(データ辞書の一覧表)を提示し、原案を基に建設機械メーカー等の関係者と意見交換を行い、成案に向けて、すり合わせを実施する予定で、検討を進めている。そして順次、他の機種についても同様に進めていく予定である。また、この協調領域については、ISO等の規格化を見据えて取り組みを進める予定である。
②自律施工技術基盤(プラットフォーム)の整備では、協調領域(統一された信号ルール)とバーチャル建機+バーチャルフィールドと電子制御化された建設機械+実フィールドとミドルウェア(各種アプリケーションソフトウェアとOSやハードウェアの間を仲介するソフトウェア)からなるプラットフォームを整備する。このプラットフォームの実フィールドとして建設DX実験フィールドの土工フィールド7)を活用する。
自律施工技術の研究・開発を効率的に進める上で、シミュレータが有効である。コンピュータ上で建設機械の最適な動作をシミュレーションして導き出し、そのとおりに建設機械が動作するかを実フィールドで実験して検証する。試行錯誤を繰り返しながら自律施工技術を最適化する研究・開発用のプラットフォームを整備する。このプラットフォームは、民間企業や大学などにも共同研究などの枠組みにより活用してもらうことで、研究・開発を加速させ、革新的な自律施工技術が実現することを期待している。また、土研では、プラットフォームや建設DX実験フィールドの土工フィールドを活用して、技術の検証・評価や技術競技会などを行っていくことも考えている。
③安全ガイドライン・監督検査方法の提案では、自律施工技術を実際の工事現場で使用する前提となる周辺環境整備として、実効性のある安全ガイドラインや監督検査方法などを、国土交通本省と方針をすり合わせながら、国土技術政策総合研究所(以下、国総研という)とも連携しながら、提案していく予定である。
なお、②のプラットフォームにおいて、実フィールドとして使用する土工フィールドは、令和3年4月に国総研および土研にある試験走路北ループ内に整備され、利用を開始した建設DX実験フィールドを構成している研究施設である。建設DX実験フィールドは、ローカル5Gを活用した建設機械の遠隔操作、自動・自律施工の技術開発、BIM/CIM 等のICT を活用した計測及び検査技術の開発の促進を目的とした研究施設であり、図-6 のとおり目的に応じて土工フィールド、各模型施設等から構成されている。
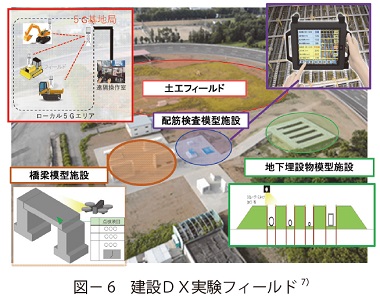
土工フィールドは、従来から土研の研究施設として活用していた約6,000m2の建設機械屋外実験施設を内包し、全体として約26,000m2の面積を有しており、フィールド全体をカバーする通信インフラとして降雨減衰なく屋外利用が容易な4.8~ 4.9GHz帯のローカル5G とWi-Fi の基地局をそれぞれ2基設置している。実験に用いる建設機械として、油圧ショベル、不整地運搬車等の土工用建設機械を始め、土砂災害対策用の特殊機械を整備している。また、操作室や機材保管用倉庫、各種の計測機器等を備え、土砂材料1,500m3を常時ストックしている。これらを用いてローカル5Gを活用した高解像度で低遅延の映像伝送、建設機械の協調制御、無人化施工等に関して実物大の実験が可能である。
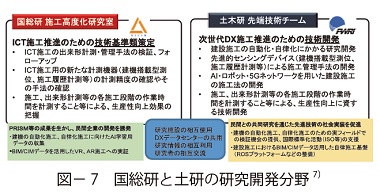
土工フィールドを活用した各種の実証や実験は、図- 7 のとおり、国総研は主にICT 施工推進のための基準類作成に係る計測技術の検証方法の確立に用い、土研は主に建設機械の自動化・自律化、AI、ロボット、5Gネットワークを用いた施工方法の開発等に資する研究開発に用いることとし、両研究機関においては資機材の共同使用、研究情報・研究者の相互利用・交流を進めていくこととしている。
(3)取り組みの現状8)9)
令和3年11月24 ~ 26日に建設DX実験フィールドで自律施工の公開デモンストレーションを(以下、公開デモという)行った。この公開デモでは、取り組み状況を説明するとともに、研究開発を進めているプラットフォームの利用事例として、油圧ショベルと不整地運搬車による掘削・積込・運搬・放土の協調作業の自律施工をデモンストレーションした。ここでは、取り組みの現状として公開デモの内容を紹介する。
1)公開デモの開催概要
日 時:令和3年11月24日(水)~ 26日(金)
場 所:建設DX実験フィールド
目 的:研究開発中の協調領域とプラットフォームを広く周知すること。
今後の研究開発の参考とするため、参加者と意見交換すること。
日 程:13:30 挨拶
13:35 デモ内容の説明
14:10 休憩(デモ準備)
14:20 デモ開始
14:50 質疑応答・意見交換
15:20 実機見学
15:45 終了
参加者:151 名(24日61 名、25日43 名、26日47 名)
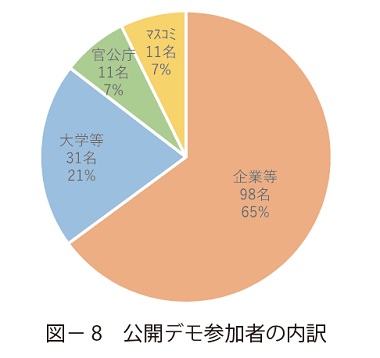
図- 8 に示すように参加された方の内訳は、企業等からが98 名(65%)で最も多く、大学等(国研などの研究機関を含む)からが31 名(21%)、官公庁からが11 名(7%)、マスコミからが11名(7%)であり、自律施工に関係する産学官の多くの方に参加をいただいた。写真- 1 は、公開デモの実施状況の写真である。

質疑応答・意見交換では、協調領域やプラットフォーム、デモンストレーションした自律施工に関する技術的な質問やこの取り組みの今後の進め方について質問や意見を多くいただいた。公開デモの三日間とも、参加された方からたくさんの発言があり、公開デモの後もメールなどで問い合わせをいただいている。
なお、公開デモの配布資料は、土研の先端技術チームのWEB サイト(https://www.pwri.go.jp/team/advanced/index.html)に掲載しており、公開デモに参加できなかった方も説明内容をWEBサイトから知ることができるようにしている。
2)取り組みの現状
公開デモで説明した①協調領域の設定、②自律施工技術基盤(プラットフォーム)の整備、③今後の進め方について、その概要を紹介する。
①協調領域の設定
公開デモでは、協調領域として設定する建設機械の制御信号の共通ルール(共通制御信号)について、自律施工システムを機能ブロックに分割し、その機能ブロック間でやりとりする信号のうち、共通制御信号とする箇所を図- 9 のように示した。機能ブロックは、施工管理システム、施工コントローラ、自動制御コントローラ、油圧制御コントローラからなり、各コントローラ間をつなぐ赤色部分の信号を共通化するべきと考えている。例えば、油圧ショベルの車両動作指令としては、バケット刃先の位置指令や走行指令などが含まれる。操作指令では、作業や走行のレバー操作量に相当する信号などが含まれる。
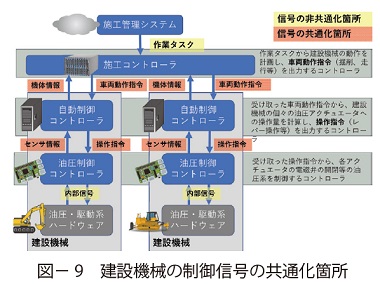
また、この考えによる油圧ショベルの共通制御信号の原案を提示した。この原案は、施工現場のデータ交換標準を定めたISO15143 Part1とPart2に基づいて検討しており、Part2に規定されているデータ辞書に相当するデータ一覧表を整理している。これらのデータ一覧表を用いた実装例も併せて提示した。
②自律施工技術基盤(プラットフォーム)の整備
公開デモでは、(仮称)OPERA(Open Platform for Earthwork with Robotics and Autonomy)として整備を進めている自律施工技術の研究開発用プラットフォームについて、全体構成と各要素について説明を行った。そのシステム構成(図-10)は、施工管理システムの下に、ミドルウェア(ROS:ロボット用に開発されるオープンソースのソフトウェアプラットフォーム)があり、そのミドルウェアを使って、自律施工を実現するための各種アプリケーションの実装ができる。また、ミドルウェアから、各種コントローラを介して、実環境やシミュレータ上の建設機械を動かす構成となっている。図- 10 の赤枠の中が(仮称)OPERA の範囲である。実環境の建設機械としては、本稿執筆時点では油圧ショベルと不整地運搬車の利用が可能であり、今後拡張する予定である。シミュレータは、建設機械の3D モデルと環境モデル(地形モデルと土砂モデル)とセンサモデルからなり、これらを自由に選択、組み合わせてシミュレータを構築でき、モデル毎に独立して開発もできる。そして、開発したプログラムを変更せずに、シミュレータと実環境上の建設機械を動かすことができる仕様となっている。
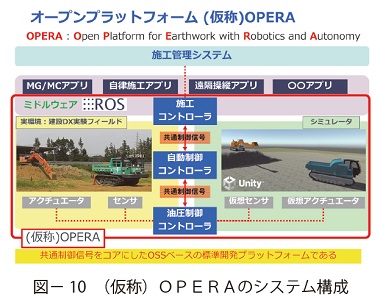
(仮称)OPERAの公開(機密情報を除く)に向けて、所内で準備を進めており、誰でも自由にカスタマイズして利用できる環境とする予定である。
③今後の進め方
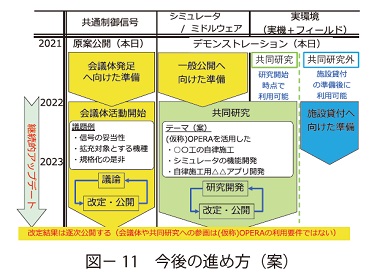
今後の進め方の案を図- 11 に示す。共通制御信号は、公開デモで提示した原案を基に、信号の妥当性、機種拡充、規格化の是非といった議論を行う会議体を発足する準備を進める。シミュレータとミドルウェアは、年度内の公開に向けて準備を進める。実環境(実機とフィールド)を含む利用は、共同研究もしくは施設貸付に向けて準備を進める。そして、これらの取り組みの進展に伴う改定等の内容は逐次公開していく予定である。
3)自律施工のデモ概要
公開デモでは、油圧ショベルと不整地運搬車による掘削・積込・運搬・放土の協調作業の自律施工をデモンストレーションした。土取り場の土砂を別の離れた場所へ移動させる作業を想定したもので、各機器や特定の作業を行う地点のレイアウトは図- 12 のとおりである。
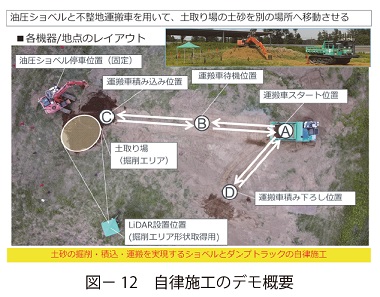
油圧ショベルと不整地運搬車の他に、掘削エリアの形状を取得するための3 次元のLiDAR センサを設置している。油圧ショベルは、LiDARセンサから得た地表形状データを基に計画されたバケット刃先の軌道指令の通りに土砂を掘削し、不整地運搬車の位置に合わせて積み込む。不整地運搬車は、Ⓐ地点からスタートして、Ⓑ→Ⓒ→Ⓑ→Ⓐ→Ⓓの順に走行する。Ⓒ地点で土砂を荷台へ積み込み、Ⓓ地点で土砂を荷台から降ろす。公開デモでは掘削・積込・運搬・放土の作業を2サイクル行った。なお、機能ブロックの施工管理システムが油圧ショベルと不整地運搬車の作業状況や位置・姿勢をモニタリングし、全体の協調作業をコントロールしている。
3.おわりに
自律施工技術は、大幅な省力化と作業環境の改善による新しい働き方の実現が期待できる技術であり、建設現場のデジタル化、見える化によるリアルタイムできめ細やかな施工管理や効率的な施工計画シミュレーションも可能となる、次のステージの生産性向上を進める技術であり、将来の施工技術の基盤となる技術である。土研の先端技術チームでは、共通制御信号の設定や(仮称)OPERA の整備、それらを用いた自律施工技術の研究・開発など、国内の自律施工技術を推進する取り組みをこれからも産学官の多岐にわたる多くの方と連携・協力しながら進めていく予定である。近い将来、国内の建設現場で革新的な自律施工技術が広く活用されていくことを期待している。
参考文献
1)(一社)日本建設業連合会:建設業ハンドブック2021.2021.11
2)総務省統計局:令和2年労働力調査年報、2021.5
3)岩見吉輝:自律施工の技術開発促進に向けた土木研究所の取り組みについて、東京大学「i-Construction システム学」寄付講座2021年度第2 回公開ワークショップ基調講演資料、http://www.i-con.t.u-tokyo.ac.jp/、2021.5
4)岩見吉輝:自律施工技術の今後の展望、土木技術資料63-9(2021)pp.5-7、2021.9
5)(一社)日本建設業連合会:建設業のためのロボットに関する調査報告書、2020.3
6)山内元貴ほか:建設機械施工における研究開発用標準プラットフォームの提案、ロボティクス・メカトロニクス講演会2020 in Kanazawa、2P1-A08、2020.5
7)山下尚ほか:国総研, 土研の建設DX実験フィールド(土工フィールド)の整備及び活用について、建設マネジメント技術552 号pp.19-25、2021.11
8) 山内元貴ほか:自律施工における協調領域の提案と自律施工技術基盤の開発、令和3年度建設施工と建設機械シンポジウム、42、2021.12
9)遠藤大輔ほか:自律施工を実現する建設ロボット開発のためのオープンプラットフォーム、第22 回計測自動制御学会システムインテグレーション部門講演会、3H3-12、2021.12
