
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 ConFlex
ConFlex 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせコンクリート構造物のうき・剥離を検出可能な非破壊検査技術
~次世代社会インフラ用ロボットの公募~
~次世代社会インフラ用ロボットの公募~
国土交通省 九州地方整備局
企画部 建設専門官
企画部 建設専門官
伴 和 美
キーワード:橋梁点検、点検支援ロボット、NETIS テーマ設定型、非破壊検査
1.はじめに
高度経済成長期などに集中的に整備された我が国の社会インフラの多くの施設で、老朽化が急速に進行する一方で、社会情勢としての人口減少・少子高齢化の進行によって、現場技術者が不足する等といった重要かつ喫緊の課題に直面している。特に、社会インフラの維持管理に関しては、ICT(情報通信技術)等を活用した、より効率的かつ効果的なインフラ点検の実施が求められている。
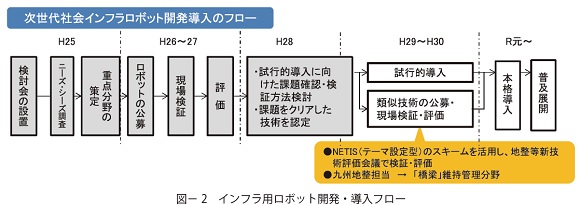
国土交通省と経済産業省では、平成 25 年度に共同で設置した「次世代社会インフラ用ロボット開発・導入検討会」において、インフラ管理者及び災害対応経験者等への現場ニーズ調査や、国内外の異分野を含めた技術シーズ調査を行い、次世代社会インフラ用ロボット開発・導入の「重点 5 分野」を策定した(図- 1)。
国土交通省では、重点分野である「橋梁・トンネル・ダム・河川構造物」のインフラ点検や「災害時の調査、応急復旧作業」を対象にして、平成26 ~ 27 年度の 2 ヶ年で実用性に優れたロボットを民間事業者等から公募し、実用性を確認するための現場検証と評価を実施した。
有用な技術については、平成 28 年度以降、本格的な導入・普及・展開に向けた取組が進められているところである。

本稿は、近年、橋梁点検において様々な後発類似技術が開発されていることを踏まえ、「次世代社会インフラ用ロボット開発・導入の推進」施策の一環として、九州地方整備局が実施した、「コンクリート構造物のうき・剥離を検出可能な非破壊検査技術」に関する NETIS テーマ設定型の取組について報告するものである。
2.NETISテーマ設定型による後発類似技術の公募
点検ロボット等の現場活用を迅速化するために本公募で採用した「NETIS テーマ設定型」のスキームは、民間事業者等により開発された有用な新技術を公共工事等において積極的に活用・評価し、技術開発を促進することを目的として、性能評価項目および試験方法などのリクワイアメント(要求性能)を提示のうえ公募し、応募があった技術の同一条件下での現場試行結果に基づいた評価・認定を行うことで、有用な技術の積極的な活用を図るものである。開発・導入のフローを図- 2 に示す。
九州地方整備局では、維持管理分野の「橋梁部門」を担当し、「橋梁点検記録作成支援ロボット(コンクリート構造物のうき・剥離を検出可能な非破壊検査技術)」に関する「後発類似技術」の公募を「平成 29 年 6 月 21 日~ 7 月 21 日」の期間に手続き後、実証対象技術の選定を行い、直轄現場において各技術の性能評価試験を実施した。
3.橋梁点検における損傷(うき・剥離) 把握上の課題
橋梁におけるコンクリート構造部(鋼橋・コンクリート橋の床版、橋脚、橋台、桁等)は、中性化・塩害等の経年劣化や施工時の締固め不足など、様々な要因で「うき・剥離」といった損傷が発生する。これらの損傷は、コンクリート構造物の劣化を進行させる要因となるほか、万一、剥離片等が落下した場合には第三者被害を発生させることにつながるため、点検は近接目視や点検ハンマー打音による慎重な検査が必要となる。
しかし、点検を実施するためには、点検ポイントに接近する手段として、足場等の仮設が必要となることや点検は全て人力作業であるために多大な労力を要するなど、点検の確実性と効率性に解決すべき課題がある。
その点を踏まえ、公募する点検ロボット技術に対しては、「確実な損傷の検出」と「検出作業の効率化」が要求される。
4.公募技術への要求性能
公募技術に対する要求性能としては、「精度」と「効率性」を求めるものとして設定し、「評価及び試験方法」は表- 1 に示すとおりである。
具体的な評価項目は、「精度」として「A - 1: 損傷の検出精度」、「効率性」として「B - 2:損傷的中率」を設定した。
性能評価試験は、従来方法(打音検査)による点検で確認された損傷箇所の位置と比較して、精度及び効率性を評価するものとした。
評価指標のうち、「検出率」は要求水準を「100%」とした。これは、非破壊検査の適用条件下において、従来技術で検出した「うき・剥離」の全てを検出することが必要となるためである。なお、「ヒット率」については、要求水準を「定めていない」。
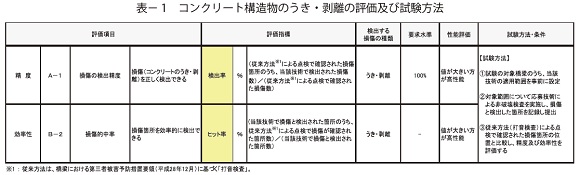
これは、従来点検で検出した箇所のうち、応募技術が検出した箇所の割合であり、応募技術が安全側に検出した場合、的中率が低くなるため「定めていない」ものである。
性能評価については、「精度」及び「効率性」の両者とも、その値が「大きい方が高性能技術」であると評価するものとした。
5.応募技術の概要
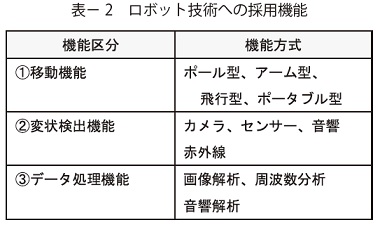
公募要領に従い応募された技術は「5 技術」であった。点検ロボットには、点検箇所まで「移動する機能」、コンクリート変状の「検出機能」、変状の程度を判定する「データ処理機能」といった機能が求められる。各応募技術が採用している各種機能をまとめると「表- 2」のとおりであり、これらの組み合わせによって「多種多様」に構成されたロボット技術が提案された。
今回応募された各技術の概要を以降に示す。
(1)ポール打検機 <ポール型>
■技術概要
地上あるいは足場、高所作業車、橋梁点検車から実施するコンクリート部材の打音検査を補助・補強する
■解析方法
点検員がヘッドホンで打撃音を聴音し、清音・濁音によって「うき・剥離」の損傷を判断する。
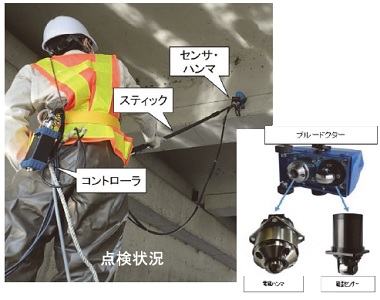
(2)回転式打音診断支援システム <ポール型>
■技術概要
①六角の軸球体をヘッド部に持つ回転式打音点検器を使用して、コンクリート表面を連続的に回転打撃し、発生する打音波形をシステム分析し、うき・剥離損傷の有無をリアルタイムに点検員が判定する
②点検ハンマーによる打音点検が困難な狭隘部の点検が可能
■解析方法
打音をマイクにて集音し、アンプにて暗騒音部分の周波数帯をフィルターカット処理することで、打音を聞き取りやすくし、打音の波形分析により、うき・剥離の損傷有無を判断する

(3)橋梁点検支援ロボット <アーム型>
■技術概要
①点検の際に、橋梁点検車が利用できない橋梁において、全ての作業を橋面上から行い、点検員に代わって橋梁下面に挿入した各種点検台車と一体になったロボットアームを遠隔操作で可動させて、赤外線サーモグラフィと打音検査装置との併用で、うき・剥離を検出する
②橋面上での占用スペースが小さく(幅 1.5m、長さ 3.0m)、歩道上に設置可能であれば車道の交通規制を回避できる
■解析方法
赤外線サーモグラフィの熱画像によって、スクリーニングし、マイク集音した打撃音と併用して点検員が損傷を判断する

(4)近接目視・打音検査等を用いた飛行ロボットによる点検システム
<飛行型>
<飛行型>
■技術概要
①有線式のマルチコプター上部に車輪駆動機構と点検機構を搭載、マルチコプターの飛行機能で橋梁の床版など人が容易に近づけない部位に接近、車輪を押し当てて走行しながら、特殊な機構による打音検査とカメラによる目視を実施する、「飛行」と「自走機能」を持つ、有線式飛行型点検ロボット
②得られた打音信号は解析技術で可視化し、うきや剥離等の損傷検出に加え、位置情報と併せて点検調書作成を支援
■解析方法
打撃装置からの打音をマイクにより集音し、周波数分布の変化から変状を自動識別する

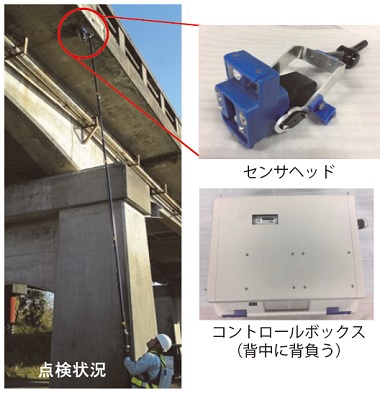
(5)コンクリート構造物変状部検知システム「BLUE DOCTOR」
<ポータブル型>
<ポータブル型>
■技術概要
①うき・剥離などの欠損部(空隙)の有無及び深さを、移動式衝撃弾性波調査法により、高精度かつ定量的に検知
②打音検査で発見し難い欠損部も検出可能で、かつ定量化が可能な打音検査を補助する
③吸着走行型ロボットに搭載すれば打音点検前のスクリーニングとして、高精度、高効率な点検が可能となる
■解析方法
弾性波エコーを自動解析して、検出表示装置に損傷の有無及び深さを「5 段階」でLED 表示させる
6.性能評価の実証試験
応募技術について、直轄橋梁の「3 現場」で実証試験を行い、従来の点検技術である「打音検査」との比較および評価を実施した。
(1)実証試験橋梁
九州地方整備局管内のコンクリート橋で、うき・剥離の発生がみられ、かつ、応募技術のロボット のタイプや点検(適用)条件等を考慮し、不利益が生じ難い橋梁を 3 橋選定した。
(2)実証試験の方法
従来の点検ハンマー打音検査による点検結果(従来点検)と応募技術により検出された損傷箇 所(応募技術)との整合について、従来点検と応募技術それぞれの「損傷推定範囲図」を用いて、次のとおり判定した。
1)一部が重複するケース
従来点検と応募技術の写真を照らし合わせて整合が確認できる場合は、「合致」と判定
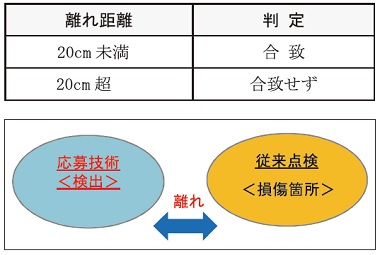
2)重複部分が無いケース(離れている)
写真判定ができない場合は、図面上の離れ距離に基づき判定
7.性能評価の方法と分析
(1)損傷判定の評価
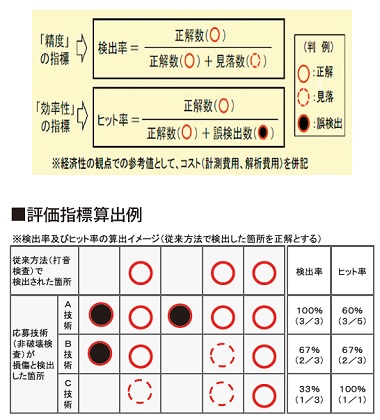
応募技術ごとに損傷判定の評価・分析を行った。分析にあたっては、検出率及びヒット率の数値を 算定したうえで実施した。
1)検出率(%)
【従来方法による点検で把握された損傷のうち、応募技術で検出できた損傷数】÷【従来方法による点検で把握された損傷数】
※「従来方法」=橋梁における第三者被害予 防措置要領(案)[ 平成 28 年 12 月に基づく打音検査]
2)ヒット率(%)
【応募技術で損傷が検出された箇所数のうち、従来方法による点検で損傷が把握された箇所数】÷【応募技術で異常が検出された箇所数】
(2)実証評価と考察
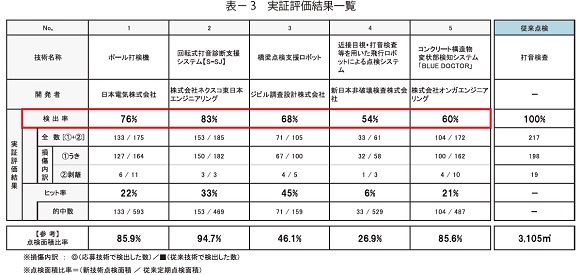
要求性能(リクワイヤメント)は、適用条件下において、従来方法で検出した「うき・剥離」を「100%」検出するという厳しい要求水準を課しているが、今回の応募技術において、検出率「100%」を達成できた技術は無かった。
応募技術の検出率は、「最高= 83%」、「最低= 54%」の範囲であった(表- 3)。
現状の応募技術においては、ロボット技術そのものの性能や精度向上のみならず、検査時の打音判定や画像判定など検査分析の結果を取り扱う技術者の技術力の確保も重要な要素であるといえる。
これら応募技術に関する評価は、平成 29 年度九州地方整備局新技術活用評価会議(第 2 回) での委員からの意見・助言および評価を得てとりまとめを行ない、平成 30 年 3 月末に公表した。
8.おわりに
今回取り組んだ「テーマ設定型(技術公募)」は、現場ニーズ、行政ニーズ等、求める性能に対して技術を公募し、ニーズに合致した技術であるか実証のうえ公表して、当該技術の活用促進を図るものであり、与えられる実証・評価の結果から、更なる技術開発を促進し、技術のスパイラルアップを図る有効な手段であると考えている。
今回のテーマでは「5 技術」の応募があり、応募技術の実証・評価を実施して、その結果を公表するに至った。本技術公募の詳細については、以下の「NETIS 維持管理サイト」で公開されている。http://www.m-net is.mlit.go.jp/theme- koubo/?prev=1
なお、令和元年 12 月現在において、実証評価を行った「全技術がNETIS 登録済み」である。今後も、この取組による「ニーズとシーズ」のマッチング、実証結果に基づく技術活用の活性化、また、更なる技術開発の促進を期待するものである。
