
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせ新型簡易遠隔操縦装置(ロボQS)の開発について
国土交通省 九州地方整備局
九州技術事務所
施工調査・技術活用課長
九州技術事務所
施工調査・技術活用課長
原 堅 次
キーワード:災害、遠隔操縦、ロボット
1.はじめに
災害直後の被災現場は、「人が立ち入ることができない・二次災害の恐れがある」など過酷で危険な場所が多く、有人による作業は困難を極める。そのような場所においては、遠隔操縦により作業可能なバックホウ等が必要とされるが、遠隔操縦に対応したバックホウは数が少ないうえ、大型の建設機械であるため、災害現場までの運搬に時間を要する等の問題があった。
そのため、九州技術事務所では、容易に運搬でき、現地で調達できるバックホウに簡単に装着することで、無線による遠隔操縦ができる簡易遠隔操縦装置(以下、「ロボQ」という。)の開発を平成11 年度に行い、災害現場等で復旧作業に対応してきた(写真- 1)。

しかし、開発から約17 年が経過し、機器構成部品の一部が生産中止となり、装置の修理等が困難な状況になっている。
また、空輸ができないことや装置を搭載することができる機種が減少するなど、新たに様々な問題が生じてきた。
そこで、現在生じている様々な問題を解決すべく新型簡易遠隔操縦装置(以下、「ロボQS」という。)を開発したので報告する。
2.ロボQ(従来の簡易遠隔操縦装置)
2.1.実績
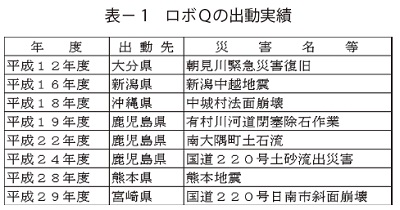
ロボQ は、災害が発生した現場に幾度となく出動し、災害の早期復旧や二次災害防止に大きく貢献してきた。平成11 年度ロボQ の開発からこれまでの出動実績を(表- 1)に示す。
2.2.ロボQの問題点
ロボQ は、開発から約17 年が経過し、以下に示すような問題が課題となっている。
①搭乗操作不可
バックホウに装置を設置する際、搭乗用の運転シートを取り外す必要があるため、装置を設置したら搭乗することができない。
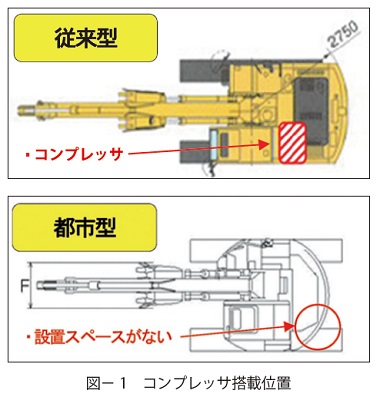
②コンプレッサ設置のスペース確保
作業用レバーや走行用レバーを駆動させる動力源が空気圧であるため、別途コンプレッサをバックホウ本体に設置する必要があるが、近年、都市型タイプ等が増えてきており、バックホウのコンプレッサ搭載位置の確保が難しくなってきている(図- 1)。
③部品調達
開発から約17 年が経過し故障が多くなっている。また、機器構成部品の一部が生産中止になり修理が困難な状況になっている。
④装置設置の作業性
装置を設置する際に、運転シートを取り外して設置する必要があり、重量物(コンプレッサ)も存在するため、組立・設置に3 人で3 時間程度の時間を要し、設置・撤去にある程度の技能の習得が必要である。
⑤搭載可能機種の減少
開発当時は約8 割の機種に搭載可能であったものが、近年の建設機械におけるシステムの高度化やセキュリティの強化により、現在では約4割にまで減少している。
3.ロボQS(新型簡易遠隔操縦装置)の開発
3.1.開発コンセプト
ロボQは開発から約17 年が経過し、様々な問題が生じてきたため、以下に示す開発コンセプトを基に平成26 年度よりロボQS の開発を始めた。
①遠隔操縦操作と搭乗操作の併用
従来の簡易遠隔操縦装置は座席上に搭載設置されていたため、座席に座ることができず、搭乗操作の方が明らかに効率的な作業であっても遠隔操縦操作による作業となり非効率的な場面も多かった。そこで、簡易遠隔操縦装置を設置したまま搭乗操作が可能となるような装置とする。
②構成機器の一般化
早急な故障対応を可能とするため、市販品や一般に手に入りやすい部品で構成する。
③装置設置の作業性の向上
機種やメーカーを問わず、建設機械への改造等を施すことなく設置可能な装置とする。また、重量ユニットを無くし、軽量小型ユニットのみで構成し、ユニット同士はネジやボルトによる締結ではなくピンによる締結とすることで、装置の着脱を専用工具や技術を要さず、短時間で行えるようにする。
3.2.新旧装置の比較
ロボQ と前述の開発コンセプトを基に今回新たに開発を行ったロボQSとの比較を以下に示す(表-2)。

①動力源
動力源が空圧式から電動式になったことにより、コンプレッサの搭載が必要なくなったため、
・搭載場所の確保調整が不要。
・空輸が可能になる。
・重量物がなくなるため、搭載する手間がなくなり組立設置の時間が短縮される。
②搭載方法
運転シートにそのまま取り付けるため、運転シートを取り外す手間が無くなり、組立設置の時間が短縮される(写真- 2)。

③搭乗運転
装置がコンパクトになり、運転シート部になにも機械を置かない構造にしたため、装置を設置したままで搭乗運転が可能となった(写真- 3)。
また、装置を設置したバックホウは遠隔操縦操作も搭乗操作もどちらも可能となるため、有人・無人の境界区域等での作業効率の向上が期待できる。

④組立時
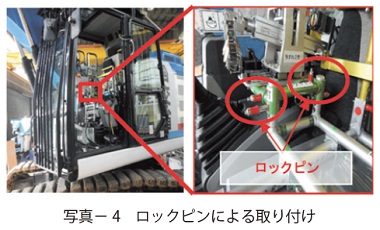
コンプレッサが必要なくなり、軽量小型ユニットのみの構成となったことに加え、ユニット同士をピンによる締結で固定(写真- 4)するようにしたことで、工具レスで組立することができるため、設置組立の負担が大きく軽減され、設置組立に要する時間も大幅に短縮される。また、フレーム構造とし旧装置のネジ締結ではなくピンによる締結なので緩むことがない(図- 2)。

⑤構成部品
構成部品は、特殊部品や特注品を使用せず、市販品を使用することにより、故障時の部品調達が容易になる。
3.3.ロボQSの特徴
今回開発したロボQS の特徴をまとめると、以下のとおりとなる。
①メーカー・機種を問わず、ほぼ100% の機種に装着可能となった。
②装置設置後の搭乗運転が可能になった
③装置を設置する作業が容易になった。
・固定方法はピンによる締結
・ユニット全体重量を半分以下に軽量化(180㎏→ 75㎏ 約100㎏軽減)
・設置時間は従来の6 分の1 に短縮(3 時間程度から、30 分程度に短縮)
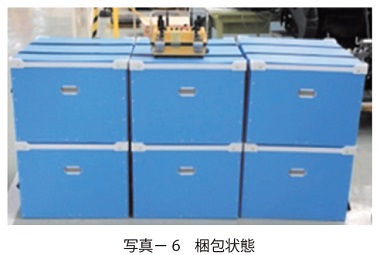
④運搬が容易になった(写真- 5、6)。
・動力源を電動化したことにより、コンプレッサが不要となり空輸も可能
・ワンボックスカー1 台での運搬が可能

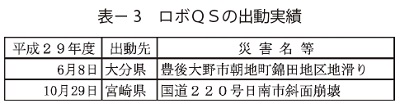
4.ロボQSの災害出動実績(表- 3)
今年度から導入されたロボQS は、早々に大分県豊後大野市の地滑り災害現場へ出動(写真- 7)するなど、今後のさらなる活躍への期待が伺える。

5.今後の取組
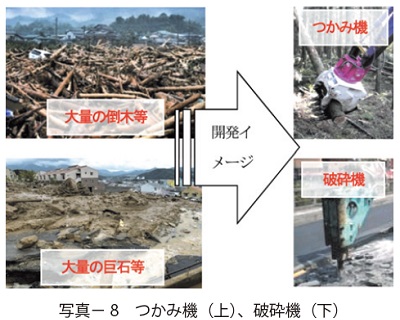
今後は、バックホウの掘削や敷均しだけでは作業が困難な、倒木等の除去、巨石等の破砕をするために必要な破砕機やつかみ機等(写真- 8)のアタッチメントにも対応できるよう改良を重ねていく予定である。さらには、運搬機械(クローラダンプ)や伐開作業機械(ブルドーザ)等、他の建設機械への適用拡大についても検討していくこととしている。
6.おわりに
今回開発したロボQS の活動範囲は、二次災害の恐れがある場所等の災害発生現場のみならず、急傾斜地における法面での作業、河川内における浚渫作業等、一般工事においても危険を伴う現場等、多数存在すると思われる。そのような現場では、人が危険を冒すこと無く作業ができる遠隔操縦機械は望まれるところであり、本装置が活躍する場面は数多くあると考えられる。
今後は、こういった一般工事現場等での活用も視野に入れ、作業時の安全性や利便性等を更に向上させていきたいと考える。
最後に、今回の開発にあたりご協力いただいた、株式会社フジタ並びに株式会社IHIの共同開発関係者の皆様に感謝の意を表す。
