
 新着情報
新着情報 協会案内
協会案内 公益支援事業
公益支援事業 公益自主事業(九州技報)
公益自主事業(九州技報) 水辺だより
水辺だより 講習会
講習会 利用規約
利用規約 各ポリシー
各ポリシー 謝辞
謝辞 お問い合わせ
お問い合わせロボットアーム式操縦装置の開発
建設省 九州技術事務所
機械課長
機械課長
坂 井 芳 晴
建設省 九州技術事務所
機械課 機械調査係長
機械課 機械調査係長
許 斐 芳 幸
1 はじめに
豪雨に伴う法面の崩壊や土石流災害などの復旧活動は,迅速な作業が必要であるにもかかわらず二次災害の恐れもあり,非常に効率の悪い危険な作業となっている。
安全施工が可能な遠隔操縦専用の建設機械はあるものの,数が少ないうえ緊急時に早急な対応(被災地への輸送に機械の解体組立等が必要)ができないことから,現地にある汎用機械を遠隔操縦機械へ切替可能な装置の開発が望まれている。
本稿は,復旧作業における安全性および初動体制の迅速化を目的として汎用建設機械に現地で簡単に装着できるコンパクトタイプの遠隔操縦装置の開発を行ったので報告する。
2 開発目標の設定
(1)基礎調査
今回の開発にあたっては,装置の開発目標の設定が非常に重要となるため,次に示す項目について調査を行った。
① 災害復旧作業調査
② 建設機械の調査
③ 油圧制御方式の調査
④ 無線装置調査
(2)開発目標
上記の調査より,次の開発目標を設定した。
① 現地で簡単に装着できる
不定期に発生する災害に対して迅速な対応ができるように装置を簡易なものとする。
② コンパクトな装置とする
装置の取付けや現地への持ち運びが容易にできるようコンパクトに製作する。
③ 現地にある汎用建設機械に装藩できる
装着対象機械を現地にある汎用の建設機械とし,機種・規格を選ばず取付けられるようにする。
3 開発装置の構想
(1)遠隔操縦方式の検討
建設機械を遠隔操縦する方式には,油圧比例弁方式(従来方式)と操作レバ一方式(機械方式)等があるが開発装置に求められる最も重要な機能としては,不定期に発生する災害に対して,できる限り短時間でどんな建設機械にも装着できる機能である。その観点において,油圧比例弁方式,操作レバー駆動方式の二つの方式を比較検討した結果,後者の方が装着時間や装着の容易性等が優れており,今回の開発は操作レバー駆動方式を採用することとした。
(2)アクチュエータの検討
操作レバーを機械的に動かすアクチュエータについては,装置のコンパクト化,安全性の適応等を考慮して,空圧式のアクチュエータを採用することとした。
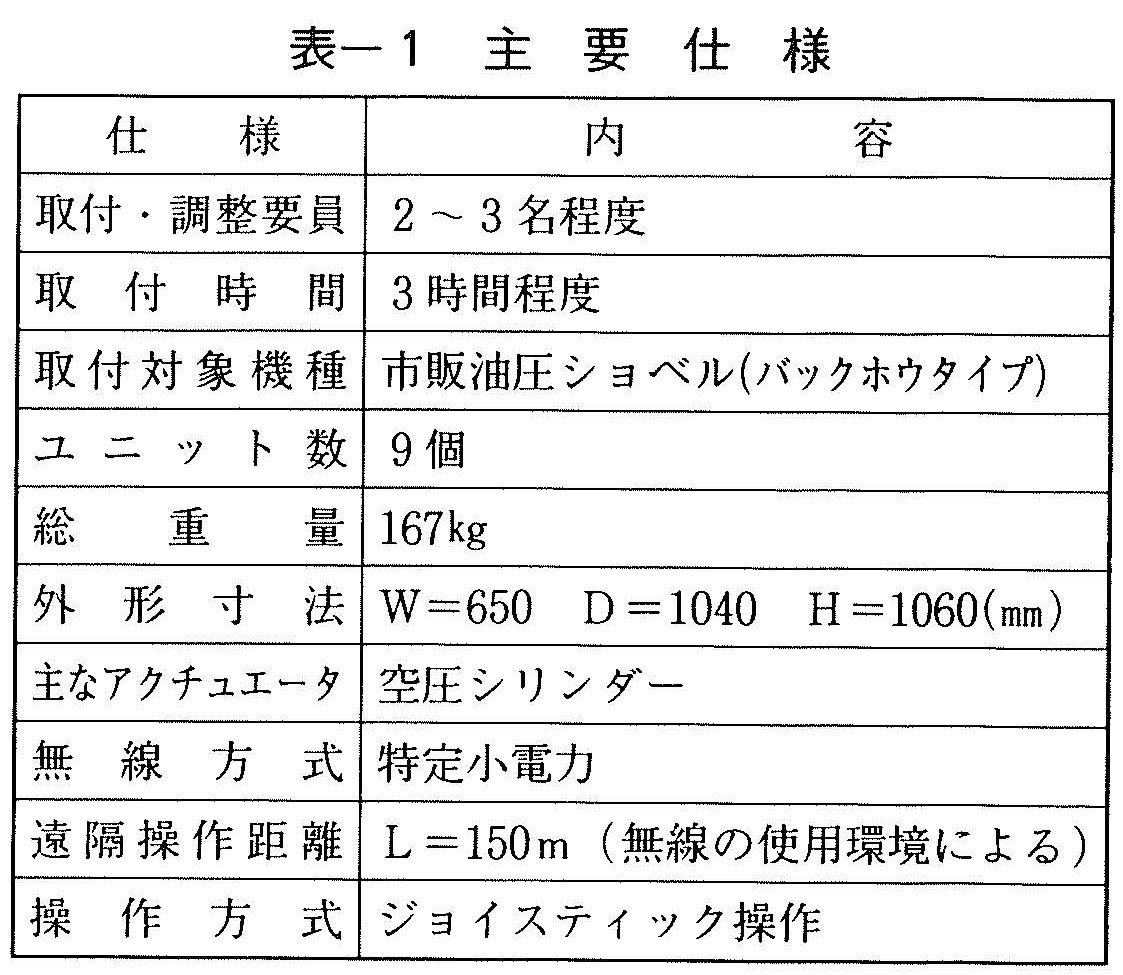
4 装置の仕様
(1)機能概要
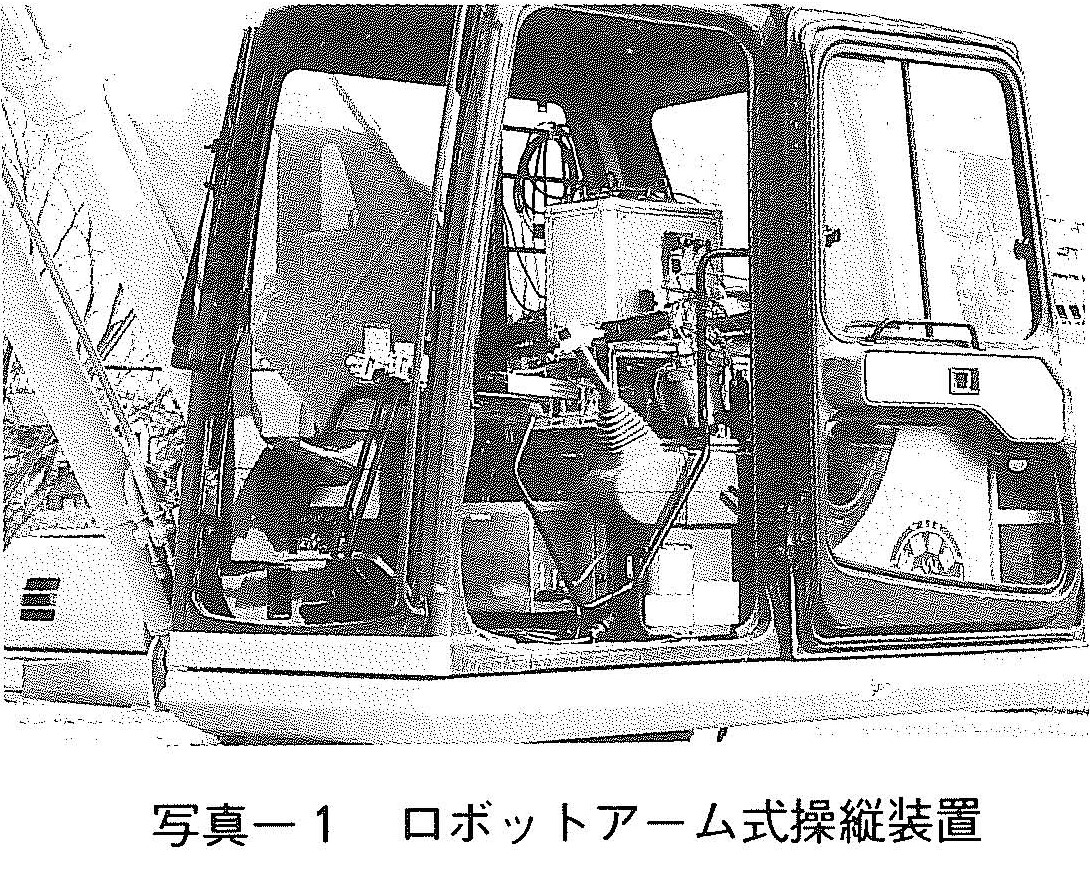
本装置は,無線によりバックホウに搭載したアクチュエータを作動させ,運転員に代わって操作レバーを遠隔にて操作することができる。
遠隔操作ユニットには,運転席に配置された操作レバーに対応したジョイスティックレバーがあり,操作時には,ジョイスティックレバーの位置に対してバックホウの操作レバーの位置が相対的に合致するようにコントロールされる。
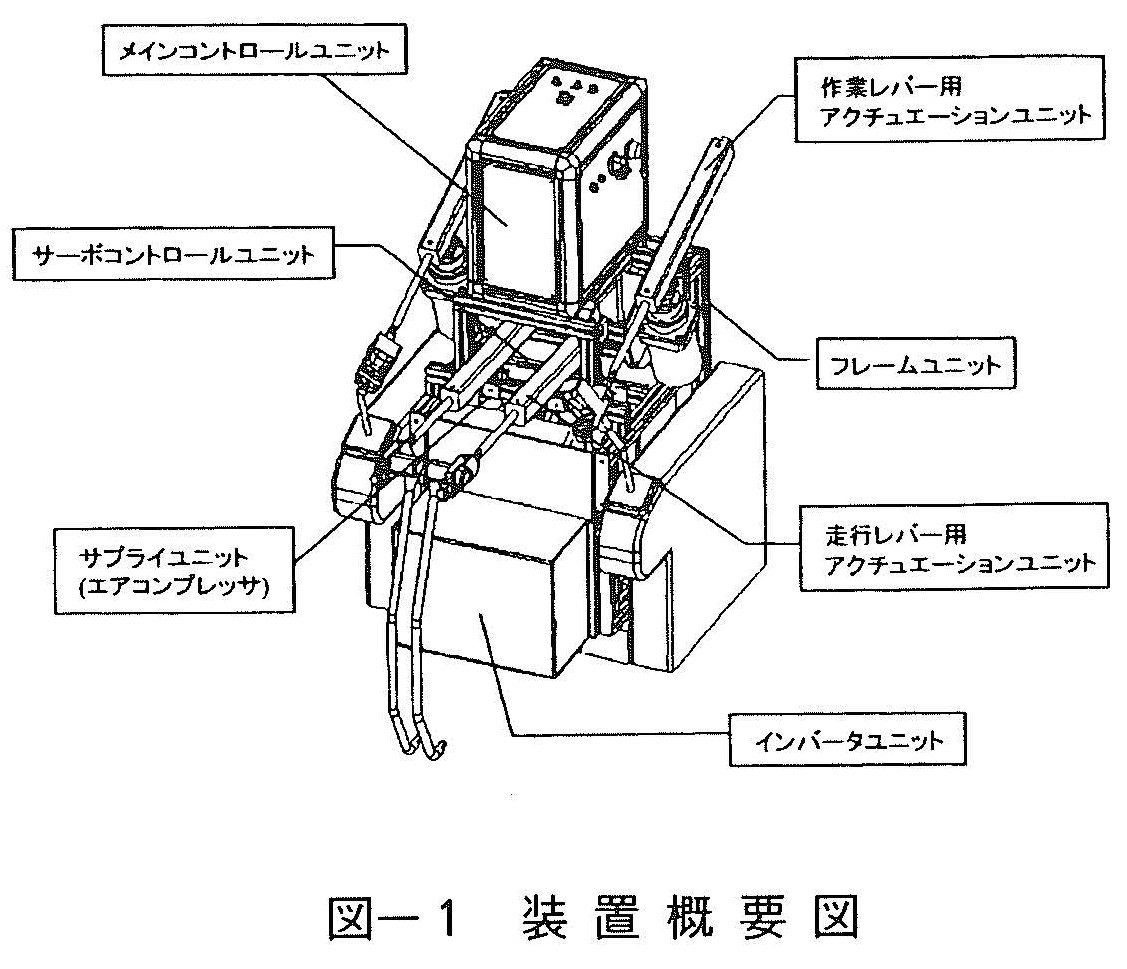
(2)装置構成
本装憧は,以下のユニットから構成される。
①アクチュエーションユニット
バックホウの運転席の操作レバーおよび走行レバーを直接制御する。
②メインコントロールユニット
各ユニットの監視およびコントロールを行う。
③サーボコントロールユニット
空圧シリンダおよび空圧モータに対して,位置制御を行うための制御機器。
④サプライユニット
電源供給のための発動発電機および空圧供給のためのコンプレッサから構成される。
⑤遠隔操作ユニット
無線送受信器およびジョイスティックレバーから構成される。
⑥フレームユニット
バックホウの運転席に各ユニットを固定する。
5 おわりに
今年度は,災害復旧作業を効率的に進めるうえで必要となる装置の耐久性確認試験,車載カメラシステム等の機能を付加し,実用化を図っていきたい。さらに現地では周辺状況を把握する必要があり,気球空撮装置と連動することにより,安全性の確保および効率化が可能となる。
